Yearbook 2013/2014 - ehedg
Yearbook 2013/2014 - ehedg
Yearbook 2013/2014 - ehedg

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
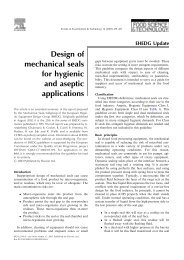
Spray cleaning systems in food processing machines and the simulation of CIP-coverage tests 57<br />
Soiling<br />
(a)<br />
(a)<br />
For the 3D soiling of surfaces from complex parts a method<br />
similar to spray paint processes was chosen (Figure 6). In<br />
that context, a model soil consisting of a polysaccharide<br />
and luminescent tracer was used and the surfaces of the<br />
test object were coated with the viscose test solution. The<br />
maximum layer thickness was limited by the avoidance of<br />
rinsing test soil.<br />
(b)<br />
(c)<br />
Test rig for cleaning<br />
For the experimental analyses a Washing Cabin test rig was<br />
used. With it, cleaning tests for open surfaces of complex<br />
parts up to a dimension of (1x1x1) m³ with several nozzle<br />
systems are practical. Furthermore, tank cleaning systems<br />
can be analysed by using a special test tank (Figure 7).<br />
Figure 5. (a) Principle of projective texturing and the application of<br />
projection for (b) a full cone nozzle; (c) and a flat fan nozzle.<br />
A characteristic of the presented approach is that a spray/<br />
impact map is only valid for a certain parameter configuration;<br />
i.e., nozzle model, pressure, distance and duration. To<br />
enhance this range further, spray patterns for different<br />
distances were interpolated linearly between each other.<br />
Cleanability test<br />
Figure 7. Test rig ‘Washing Cabin’ (left) and test tank (right).<br />
For a cleaning test the CIP station is started up by activating<br />
the bypass (Figure 8). When the steady state is reached,<br />
the threeway valve switches and the cleaning process starts.<br />
During it, a camera takes continuous pictures while an<br />
ultraviolet (UV) lamp system excites the remaining residual<br />
soil.<br />
Figure 6. Example for a cleaning test of a complex part: (1) Socket<br />
with spray shadow in detail; (2) soiled test object; and (3) test<br />
object after cleaning (green = soiled; black = clean).<br />
For verifying the simulated scenes in contrast to real<br />
experiments, an adequate cleaning test was developed.<br />
With this method, it is possible to differentiate clearly<br />
between areas with direct nozzle impact and spray<br />
shadows. Even rinsing water does not destroy the resulting<br />
spray pattern for a long period of time. Consequently, in<br />
this context the test rig ‘Washing Cabin’ at Fraunhofer<br />
AVV was used for testing single nozzles, different nozzle<br />
combinations and tank cleaning systems combined with<br />
different objects to clean.<br />
Figure 8. Scheme of the test rig Washing Cabin.