

Journal of Mechanics of Materials and Structures vol. 5 (2010 ... - MSP
Journal of Mechanics of Materials and Structures vol. 5 (2010 ... - MSP
Journal of Mechanics of Materials and Structures vol. 5 (2010 ... - MSP

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
718 BAHATTIN KILIC AND ERDOGAN MADENCI<br />
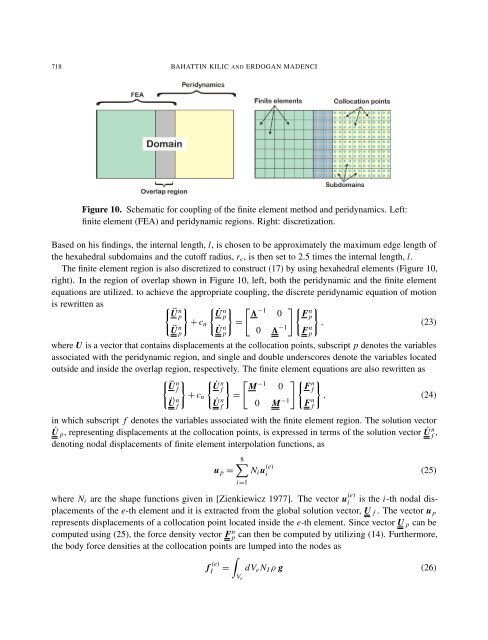
Figure 10. Schematic for coupling <strong>of</strong> the finite element method <strong>and</strong> peridynamics. Left:<br />
finite element (FEA) <strong>and</strong> peridynamic regions. Right: discretization.<br />
Based on his findings, the internal length, l, is chosen to be approximately the maximum edge length <strong>of</strong><br />
the hexahedral subdomains <strong>and</strong> the cut<strong>of</strong>f radius, rc, is then set to 2.5 times the internal length, l.<br />
The finite element region is also discretized to construct (17) by using hexahedral elements (Figure 10,<br />
right). In the region <strong>of</strong> overlap shown in Figure 10, left, both the peridynamic <strong>and</strong> the finite element<br />
equations are utilized. to achieve the appropriate coupling, the discrete peridynamic equation <strong>of</strong> motion<br />
is rewritten as � � �<br />
Ü n ˙U p<br />
+ cn<br />
n � � −1<br />
p � 0<br />
=<br />
0 � −1<br />
� � �<br />
Fn p<br />
, (23)<br />
Ü n p<br />
˙U n p<br />
where U is a vector that contains displacements at the collocation points, subscript p denotes the variables<br />
associated with the peridynamic region, <strong>and</strong> single <strong>and</strong> double underscores denote the variables located<br />
outside <strong>and</strong> inside the overlap region, respectively. The finite element equations are also rewritten as<br />
� � � n Ü ˙U f<br />
+ cn<br />
n� �<br />
f M−1 0<br />
=<br />
0 M−1 � � � n Ff , (24)<br />
Ü n f<br />
˙U n f<br />
in which subscript f denotes the variables associated with the finite element region. The solution vector<br />
˙U p, representing displacements at the collocation points, is expressed in terms <strong>of</strong> the solution vector ˙U n f ,<br />
denoting nodal displacements <strong>of</strong> finite element interpolation functions, as<br />
u p =<br />
8�<br />
i=1<br />
Ni u (e)<br />
i<br />
where Ni are the shape functions given in [Zienkiewicz 1977]. The vector u (e)<br />
i is the i-th nodal displacements<br />
<strong>of</strong> the e-th element <strong>and</strong> it is extracted from the global solution vector, U f . The vector u p<br />
represents displacements <strong>of</strong> a collocation point located inside the e-th element. Since vector U p can be<br />
computed using (25), the force density vector Fn p can then be computed by utilizing (14). Furthermore,<br />
the body force densities at the collocation points are lumped into the nodes as<br />
f (e)<br />
I =<br />
�<br />
Ve<br />
F n p<br />
F n f<br />
(25)<br />
dVe NI ρ g (26)










