Systems Thinking e System Dynamics. L'arte di capire la dinamica ...
Systems Thinking e System Dynamics. L'arte di capire la dinamica ...
Systems Thinking e System Dynamics. L'arte di capire la dinamica ...
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
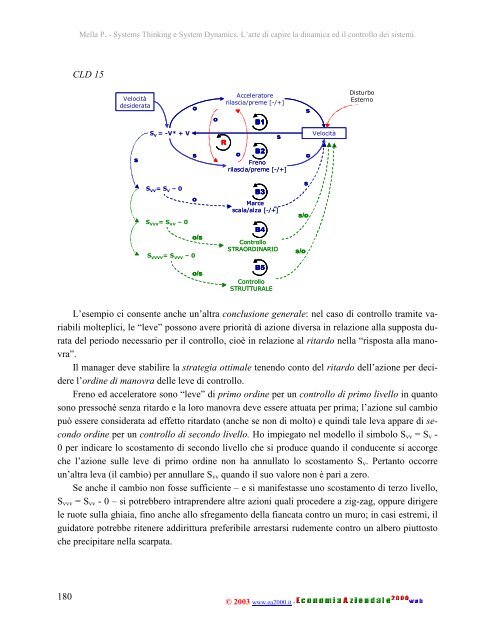
Mel<strong>la</strong> P. - <strong><strong>System</strong>s</strong> <strong>Thinking</strong> e <strong>System</strong> <strong>Dynamics</strong>. L’arte <strong>di</strong> <strong>capire</strong> <strong>la</strong> <strong>di</strong>namica ed il controllo dei sistemi.CLD 15VelocitàdesiderataooAcceleratoreri<strong>la</strong>scia/preme [-/+]B1sDisturboEsternosS V = -V* + VssRoB2Frenori<strong>la</strong>scia/preme [-/+]VelocitàoS VV = S V – 0oS VVV = S VV – 0o/sS VVVV = S VVV – 0B3Marcesca<strong>la</strong>/alza [-/+]B4ControlloSTRAORDINARIOss/os/oo/sB5ControlloSTRUTTURALEL’esempio ci consente anche un’altra conclusione generale: nel caso <strong>di</strong> controllo tramite variabilimolteplici, le “leve” possono avere priorità <strong>di</strong> azione <strong>di</strong>versa in re<strong>la</strong>zione al<strong>la</strong> supposta duratadel periodo necessario per il controllo, cioè in re<strong>la</strong>zione al ritardo nel<strong>la</strong> “risposta al<strong>la</strong> manovra”.Il manager deve stabilire <strong>la</strong> strategia ottimale tenendo conto del ritardo dell’azione per deciderel’or<strong>di</strong>ne <strong>di</strong> manovra delle leve <strong>di</strong> controllo.Freno ed acceleratore sono “leve” <strong>di</strong> primo or<strong>di</strong>ne per un controllo <strong>di</strong> primo livello in quantosono pressoché senza ritardo e <strong>la</strong> loro manovra deve essere attuata per prima; l’azione sul cambiopuò essere considerata ad effetto ritardato (anche se non <strong>di</strong> molto) e quin<strong>di</strong> tale leva appare <strong>di</strong> secondoor<strong>di</strong>ne per un controllo <strong>di</strong> secondo livello. Ho impiegato nel modello il simbolo S vv = S v -0 per in<strong>di</strong>care lo scostamento <strong>di</strong> secondo livello che si produce quando il conducente si accorgeche l’azione sulle leve <strong>di</strong> primo or<strong>di</strong>ne non ha annul<strong>la</strong>to lo scostamento S v . Pertanto occorreun’altra leva (il cambio) per annul<strong>la</strong>re S vv quando il suo valore non è pari a zero.Se anche il cambio non fosse sufficiente – e si manifestasse uno scostamento <strong>di</strong> terzo livello,S vvv = S vv - 0 – si potrebbero intraprendere altre azioni quali procedere a zig-zag, oppure <strong>di</strong>rigerele ruote sul<strong>la</strong> ghiaia, fino anche allo sfregamento del<strong>la</strong> fiancata contro un muro; in casi estremi, ilguidatore potrebbe ritenere ad<strong>di</strong>rittura preferibile arrestarsi rudemente contro un albero piuttostoche precipitare nel<strong>la</strong> scarpata.180© 2003 www.ea2000.it -