Sonderheft der Zeitschrift Landtechnik zum Tod von Prof. Dr ... - TUM
Sonderheft der Zeitschrift Landtechnik zum Tod von Prof. Dr ... - TUM
Sonderheft der Zeitschrift Landtechnik zum Tod von Prof. Dr ... - TUM
WENIGER ANZEIGEN

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
368 Arbeitswirtschaft und Schleppertechnik 44. Jahrg. <strong>Landtechnik</strong> <strong>Son<strong>der</strong>heft</strong><br />
---------------- -------=-----------<br />
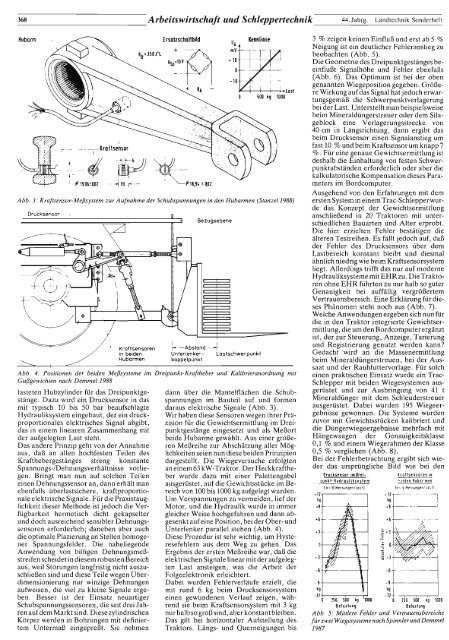
Hubarm<br />
Ersalzschaltbild<br />
I<br />
~... -_.. - - Kraftsensor<br />
I<br />
.:-. -