

antriebstechnik 10/2017
antriebstechnik 10/2017
antriebstechnik 10/2017
- TAGS
- antriebstechnik

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
KOMPONENTEN UND SOFTWARE<br />
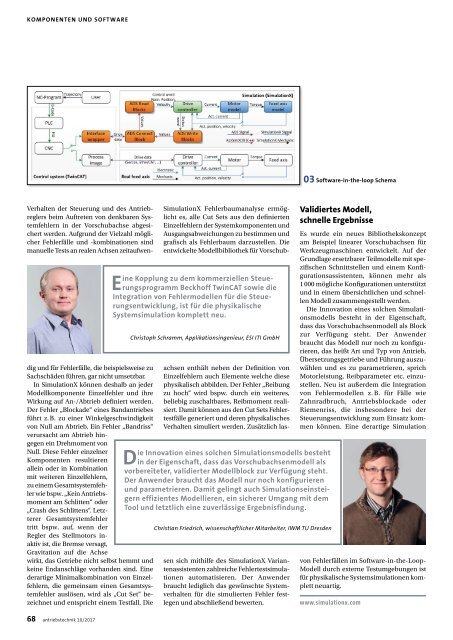
03 Software-in-the-loop Schema<br />
Verhalten der Steuerung und des Antriebreglers<br />
beim Auftreten von denkbaren Systemfehlern<br />
in der Vorschubachse abgesichert<br />
werden. Aufgrund der Vielzahl möglicher<br />
Fehlerfälle und -kombinationen sind<br />
manuelle Tests an realen Achsen zeitaufwendig<br />
und für Fehlerfälle, die beispielsweise zu<br />
Sachschäden führen, gar nicht umsetzbar.<br />
In SimulationX können deshalb an jeder<br />
Modellkomponente Einzelfehler und ihre<br />
Wirkung auf An-/Abtrieb definiert werden.<br />
Der Fehler „Blockade“ eines Bandantriebes<br />
führt z. B. zu einer Winkelgeschwindigkeit<br />
von Null am Abtrieb. Ein Fehler „Bandriss“<br />
verursacht am Abtrieb hingegen<br />
ein Drehmoment von<br />
Null. Diese Fehler einzelner<br />
Komponenten resultieren<br />
allein oder in Kombination<br />
mit weiteren Einzelfehlern,<br />
zu einem Gesamtsystemfehler<br />
wie bspw. „Kein Antriebsmoment<br />
am Schlitten“ oder<br />
„Crash des Schlittens“. Letzterer<br />
Gesamtsystemfehler<br />
tritt bspw. auf, wenn der<br />
Regler des Stellmotors inaktiv<br />
ist, die Bremse versagt,<br />
Gravitation auf die Achse<br />
wirkt, das Getriebe nicht selbst hemmt und<br />
keine Endanschläge vorhanden sind. Eine<br />
derartige Minimalkombination von Einzelfehlern,<br />
die gemeinsam einen Gesamtsystemfehler<br />
auslösen, wird als „Cut Set“ bezeichnet<br />
und entspricht einem Testfall. Die<br />
Eine Kopplung zu dem kommerziellen Steuerungsprogramm<br />
Beckhoff TwinCAT sowie die<br />
Integration von Fehlermodellen für die Steuerungsentwicklung,<br />
ist für die physikalische<br />
Systemsimulation komplett neu.<br />
Christoph Schramm, Applikationsingenieur, ESI ITI GmbH<br />
Die Innovation eines solchen Simulationsmodells besteht<br />
in der Eigenschaft, dass das Vorschubachsenmodell als<br />
vorbereiteter, validierter Modellblock zur Verfügung steht.<br />
Der Anwender braucht das Modell nur noch konfigurieren<br />
und parametrieren. Damit gelingt auch Simulationseinsteigern<br />
effizientes Modellieren, ein sicherer Umgang mit dem<br />
Tool und letztlich eine zuverlässige Ergebnisfindung.<br />
Christian Friedrich, wissenschaftlicher Mitarbeiter, IWM TU Dresden<br />
SimulationX Fehlerbaumanalyse ermöglicht<br />
es, alle Cut Sets aus den definierten<br />
Einzelfehlern der Systemkomponenten und<br />
Ausgangsabweichungen zu bestimmen und<br />
grafisch als Fehlerbaum darzustellen. Die<br />
entwickelte Modellbibliothek für Vorschubachsen<br />
enthält neben der Definition von<br />
Einzelfehlern auch Elemente welche diese<br />
physikalisch abbilden. Der Fehler „Reibung<br />
zu hoch“ wird bspw. durch ein weiteres,<br />
beliebig zuschaltbares, Reibmoment realisiert.<br />
Damit können aus den Cut Sets Fehlertestfälle<br />
generiert und deren physikalisches<br />
Verhalten simuliert werden. Zusätzlich lassen<br />
sich mithilfe des SimulationX Variantenassistenten<br />
zahlreiche Fehlertestsimulationen<br />
automatisieren. Der Anwender<br />
braucht lediglich das gewünschte Systemverhalten<br />
für die simulierten Fehler festlegen<br />
und abschließend bewerten.<br />
Validiertes Modell,<br />
schnelle Ergebnisse<br />
Es wurde ein neues Bibliothekskonzept<br />
am Beispiel linearer Vorschubachsen für<br />
Werkzeugmaschinen entwickelt. Auf der<br />
Grundlage ersetzbarer Teilmodelle mit spezifischen<br />
Schnittstellen und einem Konfigurationsassistenten,<br />
können mehr als<br />
1 000 mögliche Konfigurationen unterstützt<br />
und in einem übersichtlichen und schnellen<br />
Modell zusammengestellt werden.<br />
Die Innovation eines solchen Simulationsmodells<br />
besteht in der Eigenschaft,<br />
dass das Vorschubachsenmodell als Block<br />
zur Verfügung steht. Der Anwender<br />
braucht das Modell nur noch zu konfigurieren,<br />
das heißt Art und Typ von Antrieb,<br />
Übersetzungsgetriebe und Führung auszuwählen<br />
und es zu parametrieren, sprich<br />
Motorleistung, Reibparameter etc. einzustellen.<br />
Neu ist außerdem die Integration<br />
von Fehlermodellen z. B. für Fälle wie<br />
Zahnradbruch, Antriebsblockade oder<br />
Riemenriss, die insbesondere bei der<br />
Steuerungsentwicklung zum Einsatz kommen<br />
können. Eine derartige Simulation<br />
von Fehlerfällen im Software-in-the-Loop-<br />
Modell durch externe Testumgebungen ist<br />
für physikalische Systemsimulationen komplett<br />
neuartig.<br />
www.simulationx.com<br />
68 <strong>antriebstechnik</strong> <strong>10</strong>/<strong>2017</strong>














