Virtual Reality - Staatliche Hochschule für Gestaltung Karlsruhe
Virtual Reality - Staatliche Hochschule für Gestaltung Karlsruhe
Virtual Reality - Staatliche Hochschule für Gestaltung Karlsruhe

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
15a. Kraftrückkoplungsgeräte:<br />
Diese Geräte verursachen, wie ihr Name schon sagt, eine Kraftrückkoplung auf unseren Körper,<br />
um Rezeptorsignale auszulösen. Die ersten Versuche dieser Art sahen wie folgt aus:<br />
Eins der ersten haptischen Geräte war ein Handschuh, in dessen Fingerkuppen sich<br />
piezoelektronische Kristalle befanden. Diese fangen schon bei niedrigen Spannungen an, zu<br />
vibrieren. Durch spezielle Software wurden diese Kristalle im richtigen Moment in<br />
Schwingungen gesetzt und vermittelten somit dem Benutzer ein grobes Gefühl von Widerstand.<br />
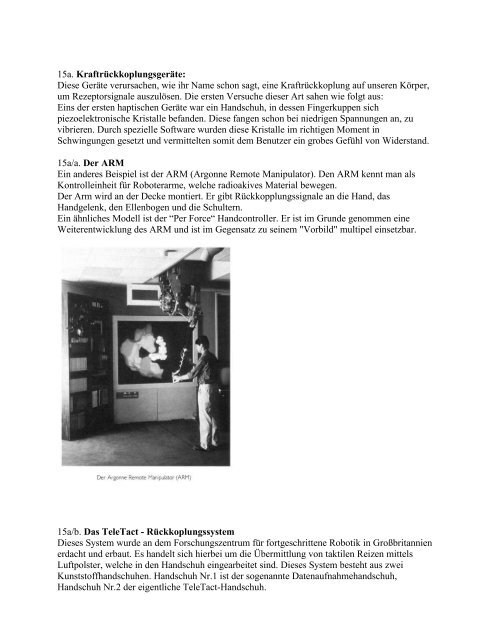
15a/a. Der ARM<br />
Ein anderes Beispiel ist der ARM (Argonne Remote Manipulator). Den ARM kennt man als<br />
Kontrolleinheit <strong>für</strong> Roboterarme, welche radioakives Material bewegen.<br />
Der Arm wird an der Decke montiert. Er gibt Rückkopplungssignale an die Hand, das<br />
Handgelenk, den Ellenbogen und die Schultern.<br />
Ein ähnliches Modell ist der “Per Force“ Handcontroller. Er ist im Grunde genommen eine<br />
Weiterentwicklung des ARM und ist im Gegensatz zu seinem "Vorbild" multipel einsetzbar.<br />
15a/b. Das TeleTact - Rückkoplungssystem<br />
Dieses System wurde an dem Forschungszentrum <strong>für</strong> fortgeschrittene Robotik in Großbritannien<br />
erdacht und erbaut. Es handelt sich hierbei um die Übermittlung von taktilen Reizen mittels<br />
Luftpolster, welche in den Handschuh eingearbeitet sind. Dieses System besteht aus zwei<br />
Kunststoffhandschuhen. Handschuh Nr.1 ist der sogenannte Datenaufnahmehandschuh,<br />
Handschuh Nr.2 der eigentliche TeleTact-Handschuh.