5003 Lectures - Faculty of Engineering and Applied Science
5003 Lectures - Faculty of Engineering and Applied Science
5003 Lectures - Faculty of Engineering and Applied Science

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
E<strong>5003</strong> - Ship Structures I 111<br />
© C.G. Daley<br />
When using the stiffness method, we always need to find a set <strong>of</strong> forces <strong>and</strong><br />
moments that occur when we impose a movement at a support. The<br />
movement will correct a situation that involved the suppression <strong>of</strong> a<br />
movement at a support. In our case here, the structure is a beam, <strong>and</strong> the<br />
supports are at the ends <strong>of</strong> the beam. The supports prevent the ends <strong>of</strong> the<br />
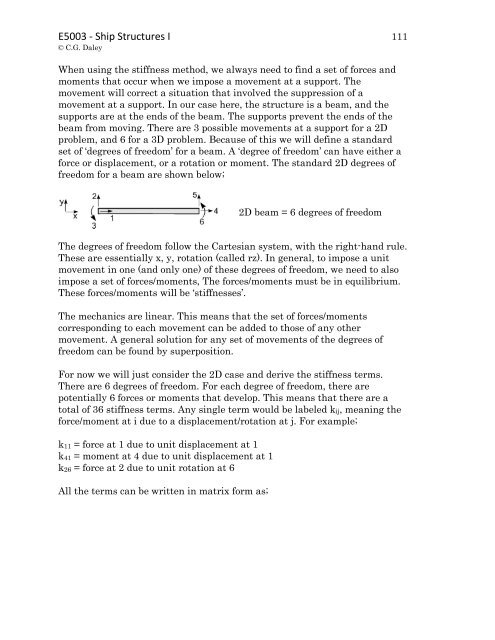
beam from moving. There are 3 possible movements at a support for a 2D<br />
problem, <strong>and</strong> 6 for a 3D problem. Because <strong>of</strong> this we will define a st<strong>and</strong>ard<br />
set <strong>of</strong> ‘degrees <strong>of</strong> freedom’ for a beam. A ‘degree <strong>of</strong> freedom’ can have either a<br />
force or displacement, or a rotation or moment. The st<strong>and</strong>ard 2D degrees <strong>of</strong><br />
freedom for a beam are shown below;<br />
The degrees <strong>of</strong> freedom follow the Cartesian system, with the right-h<strong>and</strong> rule.<br />
These are essentially x, y, rotation (called rz). In general, to impose a unit<br />
movement in one (<strong>and</strong> only one) <strong>of</strong> these degrees <strong>of</strong> freedom, we need to also<br />
impose a set <strong>of</strong> forces/moments, The forces/moments must be in equilibrium.<br />
These forces/moments will be ‘stiffnesses’.<br />
The mechanics are linear. This means that the set <strong>of</strong> forces/moments<br />
corresponding to each movement can be added to those <strong>of</strong> any other<br />
movement. A general solution for any set <strong>of</strong> movements <strong>of</strong> the degrees <strong>of</strong><br />
freedom can be found by superposition.<br />
For now we will just consider the 2D case <strong>and</strong> derive the stiffness terms.<br />
There are 6 degrees <strong>of</strong> freedom. For each degree <strong>of</strong> freedom, there are<br />
potentially 6 forces or moments that develop. This means that there are a<br />
total <strong>of</strong> 36 stiffness terms. Any single term would be labeled kij, meaning the<br />
force/moment at i due to a displacement/rotation at j. For example;<br />
k11 = force at 1 due to unit displacement at 1<br />
k41 = moment at 4 due to unit displacement at 1<br />
k26 = force at 2 due to unit rotation at 6<br />
All the terms can be written in matrix form as;<br />
2D beam = 6 degrees <strong>of</strong> freedom