


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
SINAMICS S120<br />
Управляющие модули<br />
Простой позиционер EPos<br />
3<br />
■ Обзор<br />
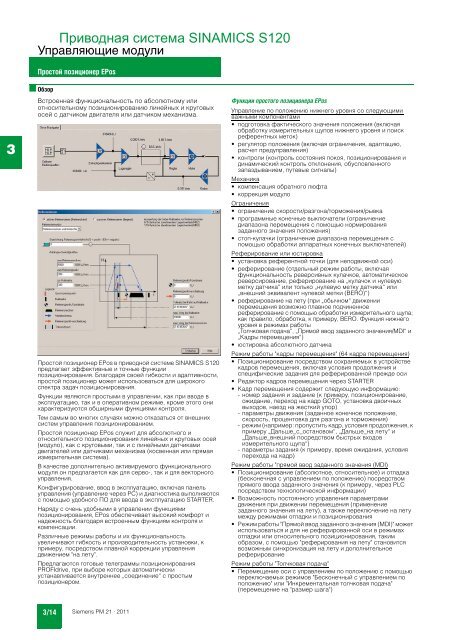
Встроенная функциональность по абсолютному или<br />
относительному позиционированию линейных и круговых<br />
осей с датчиком двигателя или датчиком механизма.<br />
Простой позиционер EPos в приводной системе SINAMICS S120<br />
предлагает эффективные и точные функции<br />
позиционирования. Благодаря своей гибкости и адаптивности,<br />
простой позиционер может использоваться для широкого<br />
спектра задач позиционирования.<br />
Функции являются простыми в управлении, как при вводе в<br />
эксплуатацию, так и в оперативном режиме, кроме этого они<br />
характеризуются обширными функциями контроля.<br />
Тем самым во многих случаях можно отказаться от внешних<br />
систем управления позиционированием.<br />
Простой позиционер EPos служит для абсолютного и<br />
относительного позиционирования линейных и круговых осей<br />
(модуло), как с круговыми, так и с линейными датчиками<br />
двигателей или датчиками механизма (косвенная или прямая<br />
измерительная система).<br />
В качестве дополнительно активируемого функционального<br />
модуля он предлагается как для серво-, так и для векторного<br />
управления.<br />
Конфигурирование, ввод в эксплуатацию, включая панель<br />
управления (управление через PC) и диагностика выполняются<br />
с помощью удобного ПО для ввода в эксплуатацию STARTER.<br />
Наряду с очень удобными в управлении функциями<br />
позиционирования, EPos обеспечивает высокий комфорт и<br />
надежность благодаря встроенным функциям контроля и<br />
компенсации.<br />
Различные режимы работы и их функциональность<br />
увеличивают гибкость и производительность установки, к<br />
примеру, посредством плавной коррекции управления<br />
движением "на лету".<br />
Предлагаются готовые телеграммы позиционирования<br />
PROFIdrive, при выборе которых автоматически<br />
устанавливается внутреннее „соединение“ с простым<br />
позиционером.<br />
Функции простого позиционера EPos<br />
Управление по положению нижнего уровня со следующими<br />
важными компонентами<br />
• подготовка фактического значения положения (включая<br />
обработку измерительных щупов нижнего уровня и поиск<br />
референтных меток)<br />
• регулятор положения (включая ограничения, адаптацию,<br />
расчет предуправления)<br />
• контроли (контроль состояния покоя, позиционирования и<br />
динамический контроль отклонения, обусловленного<br />
запаздыванием, путевые сигналы)<br />
Механика<br />
• компенсация обратного люфта<br />
• коррекция модуло<br />
Ограничения<br />
• ограничение скорости/разгона/торможения/рывка<br />
• программные конечные выключатели (ограничение<br />
диапазона перемещения с помощью нормирования<br />
заданного значения положения)<br />
• стоп-кулачки (ограничение диапазона перемещения с<br />
помощью обработки аппаратных конечных выключателей)<br />
Реферирование или юстировка<br />
• установка референтной точки (для неподвижной оси)<br />
• реферирование (отдельный режим работы, включая<br />
функциональность реверсивных кулачков, автоматическое<br />
реверсирование, реферирование на „кулачок и нулевую<br />
метку датчика“ или только „нулевую метку датчика“ или<br />
„внешний эквивалент нулевой метки (BERO)“)<br />
• реферирование на лету (при „обычном“ движении<br />
перемещения возможно плавное подчиненное<br />
реферирование с помощью обработки измерительного щупа;<br />
как правило, обработка, к примеру, BERO. Функция нижнего<br />
уровня в режимах работы<br />
„Толчковая подача“, „Прямой ввод заданного значения/MDI“ и<br />
„Кадры перемещения“)<br />
• юстировка абсолютного датчика<br />
Режим работы "кадры перемещения" (64 кадра перемещения)<br />
• Позиционирование посредством сохраняемых в устройстве<br />
кадров перемещения, включая условия продолжения и<br />
специфические задания для реферированной прежде оси<br />
• Редактор кадров перемещения через STARTER<br />
• Кадр перемещения содержит следующую информацию:<br />
- номер задания и задание (к примеру, позиционирование,<br />
ожидание, переход на кадр GOTO, установка двоичных<br />
выходов, наезд на жесткий упор)<br />
- параметры движения (заданное конечное положение,<br />
скорость, процентовка для разгона и торможения)<br />
- режим (например: пропустить кадр, условия продолжения, к<br />
примеру „Дальше_с_остановом“, „Дальше_на лету“ и<br />
„Дальше_внешний посредством быстрых входов<br />
измерительного щупа“)<br />
- параметры задания (к примеру, время ожидания, условия<br />
перехода на кадр)<br />
Режим работы "прямой ввод заданного значения (MDI)<br />
• Позиционирование (абсолютное, относительное) и отладка<br />
(бесконечная с управлением по положению) посредством<br />
прямого ввода заданного значения (к примеру, через PLC<br />
посредством технологической информации)<br />
• Возможность постоянного управления параметрами<br />
движения при движении перемещения (применение<br />
заданного значения на лету), а также переключение на лету<br />
между режимами отладки и позиционирования<br />
• Режим работы "Прямой ввод заданного значения (MDI)" может<br />
использоваться и для не реферированной оси в режимах<br />
отладки или относительного позиционирования, таким<br />
образом, с помощью "реферирования на лету" становится<br />
возможным синхронизация на лету и дополнительное<br />
реферирование<br />
Режим работы "Толчковая подача"<br />
• Перемещение оси с управлением по положению с помощью<br />
переключаемых режимов "Бесконечный с управлением по<br />
положению" или "Инкрементальная толчковая подача"<br />
(перемещение на "размер шага")<br />
3/14 Siemens PM 21 · 2011














