


Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Safety Integrated<br />
12<br />
Safety Integrated<br />
■ Функция (продолжение)<br />
Базовые функции и расширенные функции<br />
Функции Safety-Integrated приводной системы SINAMICS S120<br />
подразделяются на т.н. базовые и расширенные функции.<br />
Базовые функции включены в стандартный объем поставки, т.е.<br />
лицензия для них не требуется.<br />
Для использования же расширенных функций, напротив, для<br />
каждой оси требуется лицензия. Активация расширенных<br />
функций осуществляется через клеммы на терминальном модуле<br />
TM54F или через безопасную коммуникацию PROFIsafe на PRO-<br />
FIBUS или PROFINET 1) . Кроме этого, базовый функции могут<br />
быть активированы через встроенные клеммы на устройстве или<br />
через PROFIsafe 2) .<br />
• базовые функции<br />
- Safe Torque Off (STO)<br />
- Safe Brake <strong>Control</strong> (SBC)<br />
- Safe Stop 1 (SS1)<br />
• расширенные функции<br />
- Safe Stop 1 (SS1) с SBR<br />
- Safe Stop 2 (SS2) с SBR<br />
- Safe Operating Stop (SOS)<br />
- Safely-Limited Speed (SLS)<br />
- Safe Speed Monitor (SSM)<br />
При расширенных функциях Safe Stop 1 (SS1) и Safe Stop 2<br />
(SS2) с SBR на этапе торможения выполняется безопасный<br />
контроль на разгон (SBR), чтобы определить ошибку уже на<br />
этапе торможения.<br />
Расширенные функции предлагаются для модулей двигателей<br />
форматов "книжный" и "шасси" от версии исполнения 3 (последняя<br />
позиция заказного номера 3).<br />
Для базовых функций – активированных через встроенные<br />
клеммы в устройстве или через PROFIsafe – датчик не нужен.<br />
От версии микропрограммного обеспечения SINAMICS V4.3 3)<br />
расширенные функции Safe Stop 1 (SS1) с SBR и Safely-Limited<br />
Speed также доступны без датчика (сначала только в<br />
комбинации с асинхронными двигателями).<br />
При очень высоких динамических требованиях может<br />
потребоваться проектирование безопасной регистрации<br />
скорости/положения для функций Safe Stop 1 (SS1) с SBR и<br />
Safely-Limited Speed. Для расширенных функций Safe Stop 2<br />
(SS2) с SBR, Safe Operating Stop и Safe Speed Monitor всегда<br />
необходима безопасная регистрация скорости/положения.<br />
Безопасная регистрация скорости/положения<br />
Для безопасной регистрации значений позиций на приводе<br />
разрешается использовать только инкрементальные<br />
датчики или абсолютные датчики с фотоэлектрической<br />
разверткой. Безопасная регистрация фактического<br />
значения основывается на избыточной обработке<br />
инкрементальных дорожек A/B, выводящих сигналы sin/cos<br />
с 1 V pp .<br />
Инкрементальные дорожки<br />
Характеристика сигнала инкрементальных дорожек<br />
V pp<br />
1) PROFIsafe auf PROFINET: от версии микропрограммного обеспечения<br />
SINAMICS V2.6; для SIMOTION D в подготовке.<br />
2) От версии микропрограммного обеспечения SINAMICS V2.6 SP2<br />
или от версии микропрограммного обеспечения SIMOTION V4.1 SP4.<br />
3) Недоступно для CU310/D410/D4x5/CX32<br />
(SINAMICS версия микропрограммного обеспечения V2.x).<br />
A*<br />
A<br />
B*<br />
B<br />
G_D211_DE_00218<br />
При использовании двигателей с интерфейсом DRIVE-CLiQ<br />
фактические значения скорости/положения безопасно<br />
генерируются непосредственно в двигателе и<br />
предоставляются через безопасную коммуникацию через<br />
DRIVE-CLiQ управляющему модулю.<br />
Для безопасной регистрации скорости/положения в<br />
принципе могут использоваться:<br />
• системы с 1 датчиком или<br />
• системы с 2 датчиками<br />
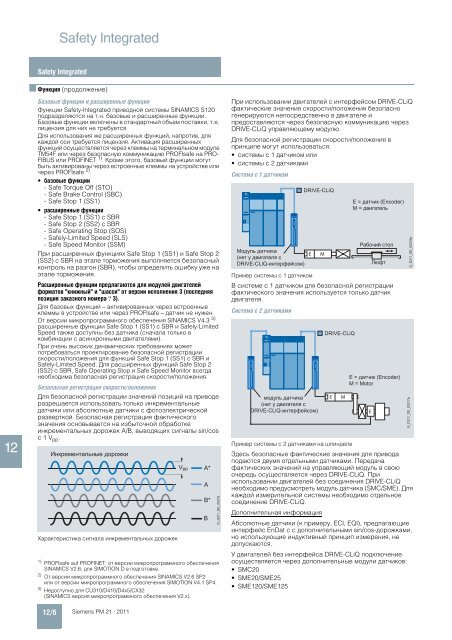
Система с 1 датчиком<br />
Модуль датчика<br />
(нет у двигателя с<br />
DRIVE-CLiQ-интерфейсом)<br />
DRIVE-CLiQ<br />
Пример системы с 1 датчиком<br />
В системе с 1 датчиком для безопасной регистрации<br />
фактического значения используется только датчик<br />
двигателя.<br />
Система с 2 датчиками<br />
модуль датчика<br />
(нет у двигателя с<br />
DRIVE-CLiQ-интерфейсом)<br />
E<br />
M<br />
DRIVE-CLiQ<br />
E = датчик (Encoder)<br />
M = двигатель<br />
Рабочий стол<br />
Люфт<br />
Пример системы с 2 датчиками на шпинделе<br />
Здесь безопасные фактические значения для привода<br />
подаются двумя отдельными датчиками. Передача<br />
фактических значений на управляющий модуль в свою<br />
очередь осуществляется через DRIVE-CLiQ. При<br />
использовании двигателей без соединения DRIVE-CLiQ<br />
необходимо предусмотреть модуль датчика (SMC/SME). Для<br />
каждой измерительной системы необходимо отдельное<br />
соединение DRIVE-CLiQ.<br />
Дополнительная информация<br />
Абсолютные датчики (к примеру, ECI, EQI), предлагающие<br />
интерфейс EnDat с с дополнительными sin/cos-дорожками,<br />
но использующие индуктивный принцип измерения, не<br />
допускаются.<br />
У двигателей без интерфейса DRIVE-CLiQ подключение<br />
осуществляется через дополнительные модули датчиков:<br />
• SMC20<br />
• SME20/SME25<br />
• SME120/SME125<br />
E<br />
M<br />
E = датчик (Encoder)<br />
M = Motor<br />
E<br />
G_D211_DE_00216a<br />
G_D211_DE_00217a<br />
12/6 Siemens PM 21 · 2011














