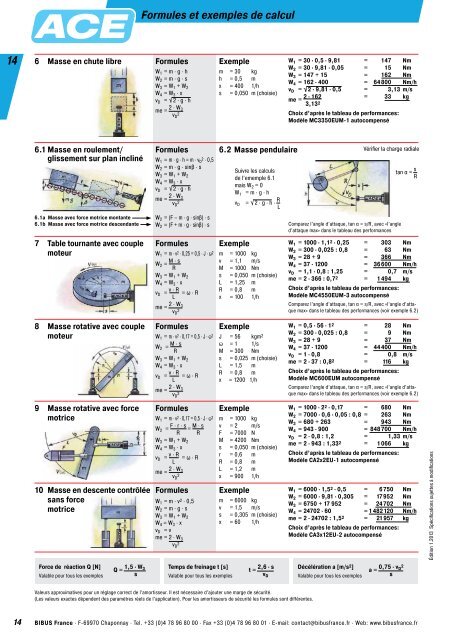
Formules <strong>et</strong> exemples <strong>de</strong> calcul146 Masse en chute libre Formules ExempleW 1 = m · g · hW 2 = m · g · sW 3 = W 1 + W 2W 4 = W 3 · xv D = √2 · g · hme = 2 · W 3v 2 Dm = 30 kgh = 0,5 mx = 400 1/hs = 0,050 m (choisie)W 1 = 30 · 0,5 · 9,81 = 147 NmW 2 = 30 · 9,81 · 0,05 = 15 NmW 3 = 147 + 15 = 162 NmW 4 = 162 · 400 = 64800 Nm/hv D = √2 · 9,81 · 0,5 = 3,13 m/sme =2 · 162 = 33 kg3,13 2Choix d’après le tableau <strong>de</strong> performances:Modèle MC3350EUM-1 autocompensé6.1 Masse en roulement/glissement sur plan incliné6.1a Masse avec force motrice montante6.1b Masse avec force motrice <strong>de</strong>scendante7 Table tournante avec couplemoteurFormulesW 1 = m · g · h = m · v D2 · 0,5W 2 = m · g · sinβ · sW 3 = W 1 + W 2W 4 = W 3 · xv D = √2 · g · hme = 2 · W 3v D2W 2 = (F – m · g · sinβ) · sW 2 = (F + m · g · sinβ) · sFormulesW 1 = m · v 2 · 0,25 = 0,5 · J · ω 2W 2 = M · sRW 3 = W 1 + W 2W 4 = W 3 · xv D = v · R = ω · RLme = 2 · W 3v 2 D6.2 Masse pendulaireSuivre les calculs<strong>de</strong> l’ememple 6.1mais W 2 = 0W 1 = m · g · hv D = √2 · g · h · RLExemplem = 1000 kgv = 1,1 m/sM = 1000 Nms = 0,050 m (choisie)L = 1,25 mR = 0,8 mx = 100 1/hVérifier la charge radialeComparez l’angle d’attaque, tan α = s/R, avec «l’angled’attaque max» dans le tableau <strong>de</strong>s performancestan α = s RW 1 = 1000 · 1,1 2 · 0,25 = 303 NmW 2 = 300 · 0,025 : 0,8 = 63 NmW 3 = 28 + 9 = 366 NmW 4 = 37 · 1200 = 36600 Nm/hv D = 1,1 · 0,8 : 1,25 = 0,7 m/sme = 2 · 366 : 0,7 2 = 1494 kgChoix d’après le tableau <strong>de</strong> performances:Modèle MC4550EUM-3 autocompenséComparez l’angle d’attaque, tan α = s/R, avec «l’angle d’attaquemax» dans le tableau <strong>de</strong>s performances (voir exemple 6.2)8 Masse rotative avec couplemoteur9 Masse rotative avec forcemotrice10 Masse en <strong>de</strong>scente contrôléesans forcemotriceForce <strong>de</strong> réaction Q [N]Valable pour tous les exemplesQ = 1,5 · W 3sFormulesW 1 = m · v 2 · 0,17 = 0,5 · J · ω 2W 2 = M · sRW 3 = W 1 + W 2W 4 = W 3 · xv D = v · R = ω · RLme = 2 · W 3v 2 DFormulesFormulesW 1 = m · v 2 · 0,5W 2 = m · g · sW 3 = W 1 + W 2W 4 = W 3 · xv D = vme = 2 · W 3v D2Temps <strong>de</strong> freinage t [s]Valable pour tous les exemplesExempleJ = 56 kgm 2ω = 1 1/sM = 300 Nms = 0,025 m (choisie)L = 1,5 mR = 0,8 mx = 1200 1/hExempleW 1 = m · v 2 · 0,17 = 0,5 · J · ω 2 m = 1000 kgv = 2 m/sW 2 = F · r · s = M · sR R F = 7000 NW 3 = W 1 + W 2M = 4200 NmW 4 = W 3 · xs = 0,050 m (choisie)r = 0,6 mv D = v · R = ω · RLR = 0,8 mL = 1,2 mme = 2 · W 3v 2 D x = 900 1/hExemplem = 6000 kgv = 1,5 m/ss = 0,305 m (choisie)x = 60 1/hW 1 = 0,5 · 56 · 1 2 = 28 NmW 2 = 300 · 0,025 : 0,8 = 9 NmW 3 = 28 + 9 = 37 NmW 4 = 37 · 1200 = 44400 Nm/hv D = 1 · 0,8 = 0,8 m/sme = 2 · 37 : 0,8 2 = 116 kgChoix d’après le tableau <strong>de</strong> performances:Modèle MC600EUM autocompenséComparez l’angle d’attaque, tan α = s/R, avec «l’angle d’attaquemax» dans le tableau <strong>de</strong>s performances (voir exemple 6.2)W 1 = 1000 · 2 2 · 0,17 = 680 NmW 2 = 7000 · 0,6 · 0,05 : 0,8 = 263 NmW 3 = 680 + 263 = 943 NmW 4 = 943 · 900 = 848700 Nm/hv D = 2 · 0,8 : 1,2 = 1,33 m/sme = 2 · 943 : 1,33 2 = 1066 kgChoix d’après le tableau <strong>de</strong> performances:Modèle CA2x2EU-1 autocompenséW 1 = 6000 · 1,5 2 · 0,5 = 6750 NmW 2 = 6000 · 9,81 · 0,305 = 17952 NmW 3 = 6750 + 17 952 = 24702 NmW 4 = 24702 · 60 = 1482120 Nm/hme = 2 · 24702 : 1,5 2 = 21957 kgChoix d’après le tableau <strong>de</strong> performances:Modèle CA3x12EU-2 autocompensét = 2,6 · sv DDécélération a [m/s 2 ]Valable pour tous les exemplesa = 0,75 · v D 2sÉdition <strong>1.2013</strong> Spécifications suj<strong>et</strong>tes à modificationsValeurs approximatives pour un réglage correct <strong>de</strong> l’amortisseur. Il est nécessaire d’ajouter une marge <strong>de</strong> sécurité.(Les valeurs exactes dépen<strong>de</strong>nt <strong>de</strong>s paramètres réels <strong>de</strong> l’application). Pour les amortisseurs <strong>de</strong> sécurité les formules sont différentes.14<strong>BIBUS</strong> <strong>France</strong> · F-69970 Chaponnay · Tel. +33 (0)4 78 96 80 00 · Fax +33 (0)4 78 96 80 01 · E-mail: contact@bibusfrance.fr · Web: www.bibusfrance.fr
Formules <strong>et</strong> exemples <strong>de</strong> calcul19 Chariot contre 2 amortisseurs Formules ExempleW 1 = m · v 2 · 0,25W 2 = F · sW 3 = W 1 + W 2W 4 = W 3 · xv D = v · 0,5me = 2 · W 3v D2m = 5000 kgv = 2 m/sx = 10 1/hF = 3500 Ns = 0,150 m (choisie)W 1 = 5000 · 2 2 · 0,25 = 5000 NmW 2 = 3500 · 0,150 = 525 NmW 3 = 5000 + 525 = 5525 NmW 4 = 5525 · 10 = 55250 Nm/hv D = 2 · 0,5 = 1 m/sme = 2 · 5525 : 1 2 = 11050 kgChoix d’après le tableau <strong>de</strong> performances:Modèle CA2x6EU-2 autocompensé1520 Chariot contre chariotFormulesW 1 = m 1· m 2 · (v1 +v 2 ) 2 · 0,5(m 1 +m 2 )W 2 = F · sW 3 = W 1 + W 2W 4 = W 3 · xv D = v 1 + v 2me = 2 · W 3v D2Exemplem = 7000 kgv 1 = 1,2 m/sx = 20 1/hm 2 = 10000 kgv 2 = 0,5 m/sF = 5000 Ns = 0,127 m (choisie)W 1 = 7000 · 10000 · 1,7 2 · 0,5(7000+10000)= 5950 NmW 2 = 5000 · 0,127 = 635 NmW 3 = 5950 + 635 = 6585 NmW 4 = 6585 · 20 = 131700 Nm/hv D = 1,2 + 0,5 = 1,7 m/sme = 2 · 6585 : 1,7 2 = 4557 kgChoix d’après le tableau <strong>de</strong> performances:Modèle CA3x5EU-1 autocompensé21 Chariot contre chariotavec 2 amortisseursFormulesW 1 = m 1· m 2 · (v1 +v 2 ) 2 · 0,25(m 1 +m 2 )W 2 = F · sW 3 = W 1 + W 2W 4 = W 3 · xv D = v 1 + v 22me = 2 · W 3v 2 DExemplem = 7000 kgv 1 = 1,2 m/sx = 20 1/hm 2 = 10000 kgv 2 = 0,5 m/sFs= 5000 N= 0,102 m (choisie)W 1 = 7000 · 10000 · 1,7 2 · 0,25 =(7000+10000)2 975 NmW 2 = 5000 · 0,102 = 510 NmW 3 = 2975 + 510 = 3485 NmW 4 = 3485 · 20 = 69700 Nm/hv D = (1,2 + 0,5) : 2 = 0,85 m/sme = 2 · 3485 : 0,85 2 = 9647 kgChoix d’après le tableau <strong>de</strong> performances:Modèle CA2x4EU-2 autocompenséNote: Lors <strong>de</strong> l’utilisation <strong>de</strong> plusieurs amortisseurs en parallèle, les valeurs W 3 , W 4 <strong>et</strong> me sont divisées en fonction du nombred’appareils utilisés.Masse effective [me]Édition <strong>1.2013</strong> Spécifications suj<strong>et</strong>tes à modificationsA Masse sans force motriceFormuleme = mExempleC Masse sans force motrice attaquantdirectement l’amortisseurFormuleme = mm = 100 kgv D = v = 2 m/sW 1 = W 3 = 200 Nmme = 2 · 200 = 100 kg4m = 20 kgv D = v = 2 m/ss = 0,1 mW 1 = W 3 = 40 Nmme = 2 · 40 = 20 kgB Masse avec force motriceFormuleme = 2 · W 3v 2 DD Masse sans force motriceavec transmission par levierExemplem = 100 kgF = 2000 Nv D = v = 2 m/ss = 0,1 mW 1 = 200 NmW 2 = 200 NmW 3 = 400 Nmme = 2 · 400 = 200 kg4ExempleExemplem = 20 kgv = 2 m/sv D = 0,5 m/ss = 0,1 mFormule2 2me = 2 · W 3v D2W 1 = W 3 = 40 Nmme = 2 · 40 = 320 kg0,5 2La masse effective (me) peut être la masse réelle (exemples A <strong>et</strong> C) ou la masse fictive représentant la force d’entraînement(ou l’action <strong>de</strong> la transmission par levier) augmentée <strong>de</strong> la masse réelle (exemples B <strong>et</strong> D).<strong>BIBUS</strong> <strong>France</strong> · F-69970 Chaponnay · Tel. +33 (0)4 78 96 80 00 · Fax +33 (0)4 78 96 80 01 · E-mail: contact@bibusfrance.fr · Web: www.bibusfrance.fr15
- Page 1 and 2: Amortisseurs industrielsAmortisseur
- Page 3 and 4: Servicesservices additionnels gratu
- Page 5 and 6: Vos avantages:• Production sécur
- Page 7 and 8: Vos avantages:• Sans entretien et
- Page 9 and 10: Une gamme imbattablewww.bibusfrance
- Page 11 and 12: Technique de l’amortissement trad
- Page 13: Formules et exemples de calculLes a
- Page 17 and 18: Tableau des performancesamortisseur
- Page 19 and 20: Amortisseurs industriels miniatures
- Page 21 and 22: Amortisseurs industriels miniatures
- Page 23 and 24: Amortisseurs industriels miniatures
- Page 25 and 26: Amortisseurs industriels miniatures
- Page 27 and 28: Amortisseurs industriels miniatures
- Page 29 and 30: Amortisseurs industriels miniatures
- Page 31 and 32: Amortisseurs industriels miniatures
- Page 33 and 34: Accessoires M5 à M25 pour amortiss
- Page 35 and 36: Accessoires M12 à M14 pour amortis
- Page 37 and 38: Conseils de montage et d’installa
- Page 39 and 40: Conseils de montage et d’installa
- Page 41 and 42: Amortisseurs industriels MA et ML33
- Page 43 and 44: Amortisseurs industriels MC/MA/ML33
- Page 45 and 46: Amortisseurs industriels MC/MA/ML45
- Page 47 and 48: Amortisseurs industriels MC/MA/ML64
- Page 49 and 50: Amortisseurs industriels INOX MC33
- Page 51 and 52: Amortisseurs industriels MC33-HT/LT
- Page 53 and 54: Ø 55,6Amortisseurs industriels
- Page 55 and 56: Réservoirs air/huileAO11 AO3 1 AO6
- Page 57 and 58: Amortisseurs industriels lourds A1
- Page 59 and 60: Amortisseurs industriels lourds CA2
- Page 61 and 62: Amortisseurs industriels lourds CA4
- Page 63 and 64: Exemples d’installations7 Course
- Page 65 and 66:
Amortisseurs industrielsexemples d
- Page 67 and 68:
Amortisseurs de sécurité SCS33
- Page 69 and 70:
Amortisseurs de sécurité SCS64
- Page 71 and 72:
Amortisseurs de sécurité SCS38
- Page 73 and 74:
Amortisseurs de sécurité SCS63
- Page 75 and 76:
Amortisseurs de sécurité CB63pour
- Page 77 and 78:
Amortisseurs de sécurité CB160pou
- Page 79 and 80:
Amortisseurs de sécurité EB63B
- Page 81 and 82:
Amortisseurs de sécurité EB160
- Page 83 and 84:
Amortisseurs de sécuritéexemples
- Page 85 and 86:
Série TUBUS Type TAabsorbeur profi
- Page 87 and 88:
Série TUBUS Type TSabsorbeur profi
- Page 89 and 90:
Série TUBUS Type TRabsorbeur profi
- Page 91 and 92:
Série TUBUS Type TR-Habsorbeur pro
- Page 93 and 94:
Série TUBUS Type TR-Labsorbeur pro
- Page 95 and 96:
Série TUBUS Type TR-HDabsorbeur pr
- Page 97 and 98:
Série TUBUS Type TCabsorbeur profi
- Page 99 and 100:
Série TUBUSabsorbeurs profilés po
- Page 101 and 102:
Série TUBUSexemples d'applications
- Page 103 and 104:
SLAB SL-030-12mousses d’amortisse
- Page 105 and 106:
SLAB SL-100-12mousses d’amortisse
- Page 107 and 108:
SLAB SL-300-12mousses d’amortisse
- Page 109 and 110:
Mousses d’amortissement de vib
- Page 111 and 112:
Mousses d’amortissement SLABrési
- Page 113 and 114:
Mousses d’amortissement de chocs
- Page 115 and 116:
Contrôleurs de vitesse rotatifs FR
- Page 117 and 118:
Contrôleurs de vitesse rotatifs FR
- Page 119 and 120:
Contrôleurs de vitesse rotatifsrot
- Page 121 and 122:
Contrôleurs de vitesse rotatifs FY
- Page 123 and 124:
Contrôleurs de vitesse rotatifs FY
- Page 125 and 126:
Contrôleurs de vitesse rotatifsexe
- Page 127 and 128:
Contrôleurs de vitesse précis VC2
- Page 129 and 130:
Contrôleurs de vitesse précis FA/
- Page 131 and 132:
Contrôleurs de vitesse DVC-32régl
- Page 133 and 134:
Contrôleurs de vitesse HBD-70régl
- Page 135 and 136:
FixationContrôleurs de vitesse hyd
- Page 137 and 138:
FixationContrôleurs de vitesse hyd
- Page 139 and 140:
Contrôleurs de vitesse hydraulique
- Page 141 and 142:
Contrôleurs de vitesse hydraulique
- Page 143 and 144:
Contrôleurs de vitesse hydraulique
- Page 145 and 146:
Contrôleurs de vitesse hydraulique
- Page 147 and 148:
Contrôleurs de vitesse hydraulique
- Page 149 and 150:
Ressorts à gaz industrielsinstruct
- Page 151 and 152:
Ressorts à gaz industrielsformulai
- Page 153 and 154:
FixationRessorts à gaz industriels
- Page 155 and 156:
FixationRessorts à gaz industriels
- Page 157 and 158:
FixationRessorts à gaz industriels
- Page 159 and 160:
FixationRessorts à gaz industriels
- Page 161 and 162:
FixationRessorts à gaz industriels
- Page 163 and 164:
Ressorts à gaz tandem GST-40force
- Page 165 and 166:
FixationRessorts à gaz en compress
- Page 167 and 168:
FixationRessorts à gaz en compress
- Page 169 and 170:
FixationRessorts à gaz en compress
- Page 171 and 172:
FixationRessorts à gaz en compress
- Page 173 and 174:
Ressorts à gaz industrielsexemples
- Page 175 and 176:
Ressorts à gaz industriels en trac
- Page 177 and 178:
FixationRessorts à gaz industriels
- Page 179 and 180:
Ressorts à gaz industriels en t
- Page 181 and 182:
Ressorts à gaz industriels en trac
- Page 183 and 184:
Ressorts à gaz industriels en trac
- Page 185 and 186:
Accessoires de montage en acieracce
- Page 187 and 188:
Accessoires de montage en acieracce
- Page 189 and 190:
Accessoires de montage en INOXacces
- Page 191 and 192:
D’autres ressorts à gaz industri
- Page 193 and 194:
Série LOCKED Types PL/SLbloqueurs
- Page 195 and 196:
Série LOCKED Types PLK/SLKbloqueur
- Page 197 and 198:
Série LOCKED Type LZ-Pbridage avec
- Page 199 and 200:
Série LOCKED Type PNbloqueurs pneu
- Page 201 and 202:
Série LOCKED Type PRKbloqueurs pne
- Page 203 and 204:
Série LOCKED Type Rbloqueurs pneum
- Page 205 and 206:
Principe de fonctionnement LOCKED-P
- Page 207 and 208:
NotesBIBUS France · F-69970 Chapon
- Page 209 and 210:
dans le mondeÉdition 1.2013 Spéci
- Page 211 and 212:
COMPOSANTS PNEUMATIQUES STANDARD ET