- Page 1:
Université de Nice-Sophia Antipoli
- Page 6 and 7:
Bresson, Jean-Louis Schneider et Je
- Page 9:
AbstractThe existence of extra-sola
- Page 12 and 13:
3.4 La Coronographie Interférentie
- Page 14 and 15:
8.4 Sources de bruit et rapport sig
- Page 17:
Introduction1
- Page 20 and 21:
4 IntroductionEn guise d’introduc
- Page 23 and 24:
Avant ProposJe présente dans cette
- Page 25 and 26:
Chapitre 1Point sur la détection d
- Page 27 and 28:
Point sur la détection d’exo-pla
- Page 29 and 30:
Point sur la détection d’exo-pla
- Page 31 and 32:
Point sur la détection d’exo-pla
- Page 33 and 34:
Imagerie directe par coronographie
- Page 35 and 36:
Chapitre 2Imagerie directe par coro
- Page 37 and 38:
Imagerie directe par coronographie
- Page 39 and 40:
Imagerie directe par coronographie
- Page 41 and 42:
Imagerie directe par coronographie
- Page 43 and 44:
Imagerie directe par coronographie
- Page 45 and 46:
Imagerie directe par coronographie
- Page 47 and 48:
Imagerie directe par coronographie
- Page 49 and 50:
Chapitre 3Principes de Coronographi
- Page 51 and 52:
Principes de coronographie 35étoil
- Page 53 and 54:
Principes de coronographie 37La cor
- Page 55 and 56:
Principes de coronographie 39que po
- Page 57 and 58:
Chapitre 4Le Coronographe à Coutea
- Page 59 and 60:
Coronographie à couteau de phase 4
- Page 61 and 62:
Coronographie à couteau de phase 4
- Page 63 and 64:
Coronographie à couteau de phase 4
- Page 65 and 66:
Coronographie à couteau de phase 4
- Page 67 and 68:
Coronographie à couteau de phase 5
- Page 69 and 70:
Coronographie à couteau de phase 5
- Page 71 and 72:
Coronographie à couteau de phase 5
- Page 74 and 75:
58 Coronographie à couteau de phas
- Page 76 and 77:
60 Coronographie à couteau de phas
- Page 78 and 79:
62 Coronographie à couteau de phas
- Page 80 and 81:
64 PKC de laboratoire
- Page 82 and 83:
66 PKC de laboratoire5.2 Réalisati
- Page 84 and 85:
68 PKC de laboratoirequi se sont av
- Page 86 and 87:
70 PKC de laboratoireLa dynamique d
- Page 88 and 89:
72 PKC de laboratoire(a)(b)Figure 5
- Page 90 and 91:
74 PKC de laboratoireLa Figure 5.9
- Page 92 and 93:
76 PKC de laboratoireFigure 5.14. F
- Page 94 and 95:
78 PKC de laboratoire
- Page 96 and 97:
80 PKC de laboratoire
- Page 98 and 99:
82 PKC de laboratoire
- Page 100 and 101: 84 PKC de laboratoire
- Page 102 and 103: 86 PKC de laboratoire
- Page 104 and 105: 88 Caméras à comptage de photons
- Page 107 and 108: Avant ProposDepuis peu, de nouvelle
- Page 109 and 110: Chapitre 6Principes du comptage de
- Page 111 and 112: Principes du comptage de photons 95
- Page 113 and 114: Principes du comptage de photons 97
- Page 115 and 116: Principes du comptage de photons 99
- Page 117 and 118: Principes du comptage de photons 10
- Page 119 and 120: Principes du comptage de photons 10
- Page 121 and 122: Chapitre 7Vers une nouvelle archite
- Page 123 and 124: Développement d’une nouvelle arc
- Page 125 and 126: Développement d’une nouvelle arc
- Page 127 and 128: Développement d’une nouvelle arc
- Page 129 and 130: Développement d’une nouvelle arc
- Page 131 and 132: Développement d’une nouvelle arc
- Page 133 and 134: Développement d’une nouvelle arc
- Page 135 and 136: Développement d’une nouvelle arc
- Page 137 and 138: Développement d’une nouvelle arc
- Page 139 and 140: Développement d’une nouvelle arc
- Page 141 and 142: Développement d’une nouvelle arc
- Page 143 and 144: Développement d’une nouvelle arc
- Page 145 and 146: Développement d’une nouvelle arc
- Page 147 and 148: Chapitre 8La caméra ALGOLConstruit
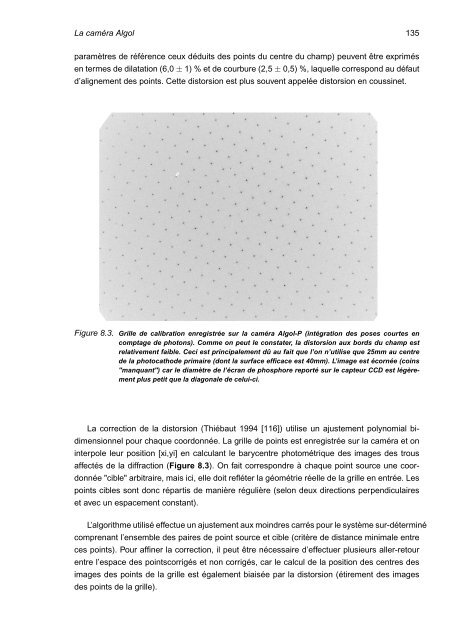
- Page 149: La caméra Algol 133mentation sur l
- Page 153 and 154: La caméra Algol 1378.2 Couplage in
- Page 155 and 156: La caméra Algol 139T coeur600 nmT
- Page 157 and 158: La caméra Algol 141L’optique de
- Page 159 and 160: La caméra Algol 143Figure 8.10. (g
- Page 161 and 162: La caméra Algol 1458.4.1 Courant d
- Page 163 and 164: La caméra Algol 147Figure 8.13. Ce
- Page 165 and 166: La caméra Algol 149où σ xC est l
- Page 167 and 168: La caméra Algol 151Une troisième
- Page 169 and 170: La caméra Algol 153par seconde), c
- Page 171 and 172: La caméra Algol 1558.10 Cryogénie
- Page 173 and 174: La caméra Algol 157Etoile λ (nm)
- Page 175 and 176: Chapitre 9Exploitation sur le GI2T/
- Page 177 and 178: Exploitation sur GI2T/REGAIN 1619.1
- Page 179 and 180: Exploitation sur GI2T/REGAIN 163Fig
- Page 181 and 182: Exploitation sur GI2T/REGAIN 165qui
- Page 183 and 184: Exploitation sur GI2T/REGAIN 167Fig
- Page 185 and 186: Exploitation sur GI2T/REGAIN 169Fig
- Page 187 and 188: Exploitation sur GI2T/REGAIN 171que
- Page 189 and 190: Exploitation sur GI2T/REGAIN 173Fig
- Page 191 and 192: Exploitation sur GI2T/REGAIN 175Sp
- Page 193 and 194: Exploitation sur GI2T/REGAIN 177Fig
- Page 195 and 196: Exploitation sur GI2T/REGAIN 179A -
- Page 197 and 198: Exploitation sur GI2T/REGAIN 1811)
- Page 199 and 200: Exploitation sur GI2T/REGAIN 183Fig
- Page 201 and 202:
Exploitation sur GI2T/REGAIN 185H,
- Page 203 and 204:
Exploitation sur GI2T/REGAIN 187qui
- Page 205 and 206:
Exploitation sur GI2T/REGAIN 189Fic
- Page 207 and 208:
Exploitation sur GI2T/REGAIN 191
- Page 209 and 210:
Exploitation sur GI2T/REGAIN 193
- Page 211 and 212:
Exploitation sur GI2T/REGAIN 195
- Page 213 and 214:
Exploitation sur GI2T/REGAIN 1979.7
- Page 215 and 216:
Exploitation sur GI2T/REGAIN 1999.8
- Page 217 and 218:
Exploitation sur GI2T/REGAIN 201
- Page 219 and 220:
Exploitation sur GI2T/REGAIN 203
- Page 221 and 222:
Exploitation sur GI2T/REGAIN 205
- Page 223 and 224:
Exploitation sur GI2T/REGAIN 207
- Page 225 and 226:
Exploitation sur GI2T/REGAIN 209
- Page 227:
Epilogue211
- Page 230 and 231:
214 Epiloguebreux autres thèmes de
- Page 233 and 234:
Annexe AArticle paru dans A&AS Ser.
- Page 235 and 236:
Annexe A : publication A&AS Ser. 21
- Page 237 and 238:
Annexe A : publication A&AS Ser. 22
- Page 239 and 240:
Annexe A : publication A&AS Ser. 22
- Page 241 and 242:
Annexe A : publication A&AS Ser. 22
- Page 243 and 244:
Annexe BProgrammation en parallèle
- Page 245 and 246:
Annexe B : Programmation en parall
- Page 247 and 248:
Annexe CListe des nuits d’observa
- Page 249 and 250:
Bibliographie[1] Abe L., Vakili F.,
- Page 251 and 252:
Bibliographie 235[32] Bruijne (de)
- Page 253 and 254:
Bibliographie 237[67] Labeyrie A.,
- Page 255 and 256:
Bibliographie 239[101] Prieur J.-L.