

Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1 제품 설명<br />
• MFC ( 피동 노드 )<br />
노드 끝점을 구비한 ESC 시스템은 통상적인 안전 시스템의 모든 인터페이스를<br />
대체합니다 .<br />
다음과 같은 입력부가 안전 로직 ESC 를 모니터링 합니다 :<br />
• 로컬 비상정지<br />
• 외부 비상정지<br />
• 오퍼레이터 보호장치<br />
• 인가 스위치<br />
• 드라이브 OFF<br />
• 드라이브 ON<br />
• 작동 모드<br />
• 인증 입력부<br />
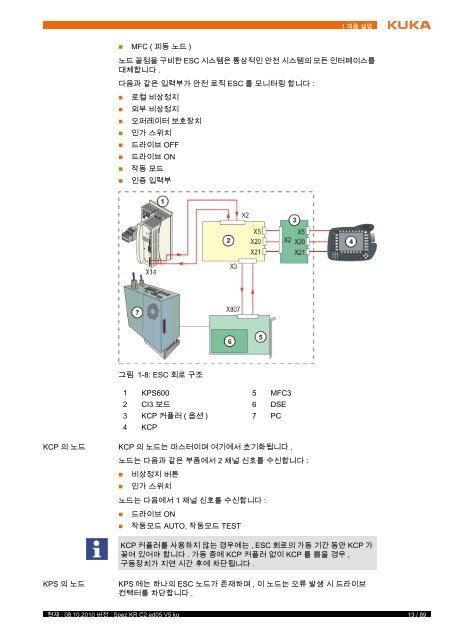
그림 1-8: ESC 회로 구조<br />
1 KPS600 5 MFC3<br />
2 CI3 보드 6 DSE<br />
3 KCP 커플러 ( 옵션 ) 7 PC<br />
4 KCP<br />
KCP 의 노드 KCP 의 노드는 마스터이며 여기에서 초기화됩니다 .<br />
노드는 다음과 같은 부품에서 2 채널 신호를 수신합니다 :<br />
• 비상정지 버튼<br />
• 인가 스위치<br />
노드는 다음에서 1 채널 신호를 수신합니다 :<br />
• 드라이브 ON<br />
• 작동모드 AUTO, 작동모드 TEST<br />
KCP 커플러를 사용하지 않는 경우에는 , ESC 회로의 가동 기간 동안 KCP 가<br />
꽂여 있어야 합니다 . 가동 중에 KCP 커플러 없이 KCP 를 뽑을 경우 ,<br />
구동장치가 지연 시간 후에 차단됩니다 .<br />
KPS 의 노드<br />
KPS 에는 하나의 ESC 노드가 존재하며 , 이 노드는 오류 발생 시 드라이브<br />
컨택터를 차단합니다 .<br />
현재 : 08.10.2010 버전 : Spez KR C2 ed05 V5 ko<br />
13 / 89














