

Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
KR C2 edition2005<br />
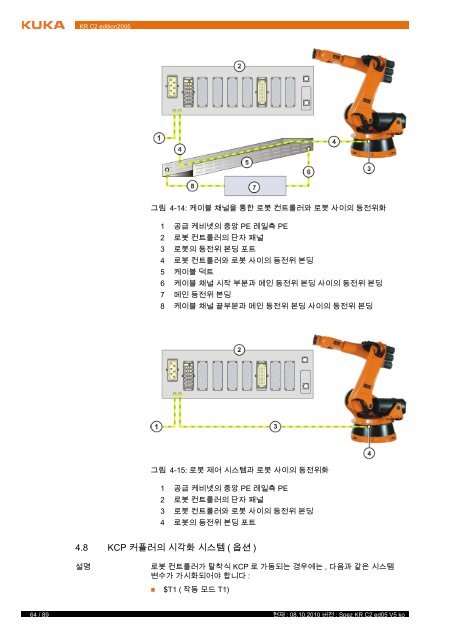
그림 4-14: 케이블 채널을 통한 로봇 컨트롤러와 로봇 사이의 등전위화<br />
1 공급 케비넷의 중앙 PE 레일측 PE<br />
2 로봇 컨트롤러의 단자 패널<br />
3 로봇의 등전위 본딩 포트<br />
4 로봇 컨트롤러와 로봇 사이의 등전위 본딩<br />
5 케이블 덕트<br />
6 케이블 채널 시작 부분과 메인 등전위 본딩 사이의 등전위 본딩<br />
7 메인 등전위 본딩<br />
8 케이블 채널 끝부분과 메인 등전위 본딩 사이의 등전위 본딩<br />
그림 4-15: 로봇 제어 시스템과 로봇 사이의 등전위화<br />
1 공급 케비넷의 중앙 PE 레일측 PE<br />
2 로봇 컨트롤러의 단자 패널<br />
3 로봇 컨트롤러와 로봇 사이의 등전위 본딩<br />
4 로봇의 등전위 본딩 포트<br />
4.8 KCP 커플러의 시각화 시스템 ( 옵션 )<br />
설명<br />
로봇 컨트롤러가 탈착식 KCP 로 가동되는 경우에는 , 다음과 같은 시스템<br />
변수가 가시화되어야 합니다 :<br />
• $T1 ( 작동 모드 T1)<br />
64 / 89 현재 : 08.10.2010 버전 : Spez KR C2 ed05 V5 ko














