

Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
6 시운전 및 재시운전<br />
• 로봇 측 모터 라인<br />
• 로봇 측 컨트롤 라인<br />
기타 사양에서는 다음과 같은 케이블이 동봉될 수 있습니다 :<br />
• 추가 축을 위한 모터 라인<br />
• 주변기기 라인<br />
위험 !<br />
로봇 컨트롤러는 각 산업용 로봇에 맞게 설정되어 있습니다 . 로봇 및<br />
부가축 ( 옵션 ) 은 케이블이 뒤바뀔 경우 잘못된 데이터를 수신하며 이로 인해<br />
인명 또는 대물 피해가 발생할 수 있습니다 . 시스템이 복수의 로봇으로<br />
이루어진 경우에는 , 연결 라인을 항상 해당 로봇 및 그에 속하는 로봇<br />
컨트롤러에 연결해야 합니다 .<br />
전제조건 • 다음과 관련된 연결 조건의 준수 : (>>> 4.3 " 연결 조건 " 페이지 53)<br />
• 라인 횡단면<br />
• 퓨즈<br />
• 전압<br />
• 전원 주파수<br />
• 안전 규정의 준수<br />
진행 방법 1. 모터 라인은 컨트롤 라인과 분리하여 머니퓰레이터의 단자 패널에<br />
배선하십시오 . 커넥터 X20 을 연결하십시오 .<br />
2. 컨트롤 라인은 모터 라인과 분리하여 머니퓰레이터의 단자 패널에<br />
배선하십시오 . 커넥터 X21 을 연결하십시오 .<br />
3. 주변기기 라인을 연결하십시오 .<br />
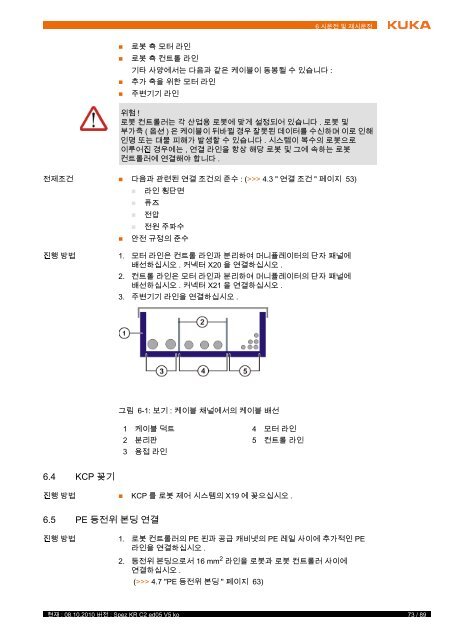
그림 6-1: 보기 : 케이블 채널에서의 케이블 배선<br />
1 케이블 덕트 4 모터 라인<br />
2 분리판 5 컨트롤 라인<br />
3 용접 라인<br />
6.4 KCP 꽂기<br />
진행 방법 • KCP 를 로봇 제어 시스템의 X19 에 꽂으십시오 .<br />
6.5 PE 등전위 본딩 연결<br />
진행 방법 1. 로봇 컨트롤러의 PE 핀과 공급 캐비넷의 PE 레일 사이에 추가적인 PE<br />
라인을 연결하십시오 .<br />
2. 등전위 본딩으로서 16 mm 2 라인을 로봇과 로봇 컨트롤러 사이에<br />
연결하십시오 .<br />
(>>> 4.7 "PE 등전위 본딩 " 페이지 63)<br />
현재 : 08.10.2010 버전 : Spez KR C2 ed05 V5 ko<br />
73 / 89














