

Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics
Titel Titel Titel Titel Titel - KUKA Robotics

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
5 운반<br />
5 운반<br />
5.1 운반 장비를 통한 운반<br />
전제조건 • 로봇 제어 시스템이 꺼진 상태여야 합니다 .<br />
• 로봇 제어 시스템에 어떤 라인도 연결되지 않아야 합니다 .<br />
• 로봇 제어 시스템의 도어가 닫힌 상태여야 합니다 .<br />
• 로봇 제어 시스템이 세워진 상태여야 합니다 .<br />
• 로봇 제어 시스템에 틸팅 방지 장치가 부착된 상태여야 합니다 .<br />
필요한 도구 • 운반용 크로스 바가 포함되거나 또는 포함되지 않은 운반 장비<br />
진행 방법 1. 운반용 크로스 바와 함께 또는 없이 운반 장비를 로봇 제어 시스템에 있는<br />
4 개의 모든 운반 고리에 거십시오 .<br />
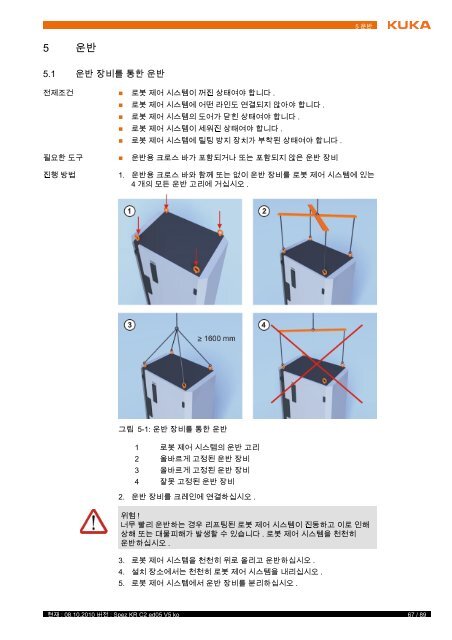
그림 5-1: 운반 장비를 통한 운반<br />
1 로봇 제어 시스템의 운반 고리<br />
2 올바르게 고정된 운반 장비<br />
3 올바르게 고정된 운반 장비<br />
4 잘못 고정된 운반 장비<br />
2. 운반 장비를 크레인에 연결하십시오 .<br />
위험 !<br />
너무 빨리 운반하는 경우 리프팅된 로봇 제어 시스템이 진동하고 이로 인해<br />
상해 또는 대물피해가 발생할 수 있습니다 . 로봇 제어 시스템을 천천히<br />
운반하십시오 .<br />
3. 로봇 제어 시스템을 천천히 위로 올리고 운반하십시오 .<br />
4. 설치 장소에서는 천천히 로봇 제어 시스템을 내리십시오 .<br />
5. 로봇 제어 시스템에서 운반 장비를 분리하십시오 .<br />
현재 : 08.10.2010 버전 : Spez KR C2 ed05 V5 ko<br />
67 / 89














