Skript - Institut für Theoretische Physik - TU Berlin
Skript - Institut für Theoretische Physik - TU Berlin
Skript - Institut für Theoretische Physik - TU Berlin

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
3. Der Starre Körper 42<br />
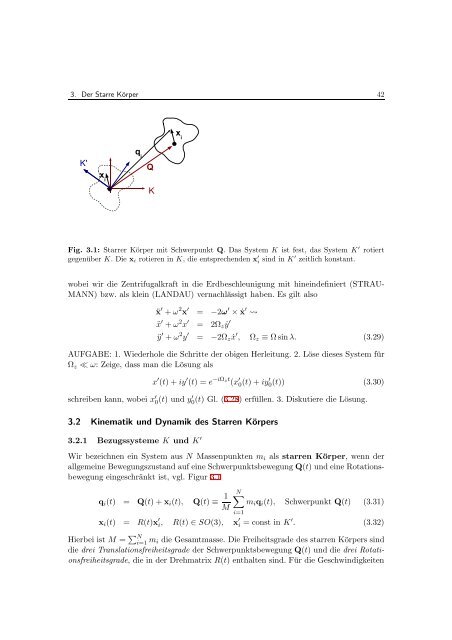
Fig. 3.1: Starrer Körper mit Schwerpunkt Q. Das System K ist fest, das System K ′ rotiert<br />
gegenüber K. Die x i rotieren in K, die entsprechenden x ′ i sind in K′ zeitlich konstant.<br />
wobei wir die Zentrifugalkraft in die Erdbeschleunigung mit hineindefiniert (STRAU-<br />
MANN) bzw. als klein (LANDAU) vernachlässigt haben. Es gilt also<br />
ẍ ′ + ω 2 x ′ = −2ω ′ × ẋ ′ <br />
ẍ ′ + ω 2 x ′ = 2Ω z ẏ ′<br />
ÿ ′ + ω 2 y ′ = −2Ω z ẋ ′ , Ω z ≡ Ω sinλ. (3.29)<br />
AUFGABE: 1. Wiederhole die Schritte der obigen Herleitung. 2. Löse dieses System <strong>für</strong><br />
Ω z ≪ ω: Zeige, dass man die Lösung als<br />
x ′ (t) + iy ′ (t) = e −iΩzt (x ′ 0 (t) + iy′ 0 (t)) (3.30)<br />
schreiben kann, wobei x ′ 0 (t) und y′ 0 (t) Gl. (3.28) erfüllen. 3. Diskutiere die Lösung.<br />
3.2 Kinematik und Dynamik des Starren Körpers<br />
3.2.1 Bezugssysteme K und K ′<br />
Wir bezeichnen ein System aus N Massenpunkten m i als starren Körper, wenn der<br />
allgemeine Bewegungszustand auf eine Schwerpunktsbewegung Q(t) und eine Rotationsbewegung<br />
eingeschränkt ist, vgl. Figur 3.1<br />
q i (t) = Q(t) + x i (t),<br />
Q(t) ≡ 1 M<br />
N∑<br />
m i q i (t), Schwerpunkt Q(t) (3.31)<br />
i=1<br />
x i (t) = R(t)x ′ i, R(t) ∈ SO(3), x ′ i = const in K ′ . (3.32)<br />
Hierbei ist M = ∑ N<br />
i=1 m i die Gesamtmasse. Die Freiheitsgrade des starren Körpers sind<br />
die drei Translationsfreiheitsgrade der Schwerpunktsbewegung Q(t) und die drei Rotationsfreiheitsgrade,<br />
die in der Drehmatrix R(t) enthalten sind. Für die Geschwindigkeiten