Linear Programming Lecture Notes - Penn State Personal Web Server
Linear Programming Lecture Notes - Penn State Personal Web Server
Linear Programming Lecture Notes - Penn State Personal Web Server

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
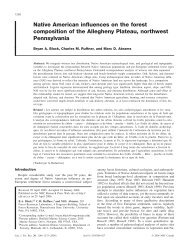
f(x1)+(1− λ)f(x2)<br />
f(λx1 +(1− λ)x2)<br />
Figure 4.2. A convex function: A convex function satisfies the expression f(λx1 +<br />
(1 − λ)x2) ≤ λf(x1) + (1 − λ)f(x2) for all x1 and x2 and λ ∈ [0, 1].<br />
Theorem 4.9. Let f : R n → R be a convex function. Then the set C = {x ∈ R n :<br />
f(x) ≤ c}, where c ∈ R, is a convex set.<br />
Exercise 40. Prove the Theorem 4.9. [Hint: Skip ahead and read the proof of Lemma<br />
4.15. Follow the steps in that proof, but apply them to f.]<br />
3. Polyhedral Sets<br />
Important examples of convex sets are polyhedral sets, the multi-dimensional analogs of<br />
polygons in the plane. In order to understand these structures, we must first understand<br />
hyperplanes and half-spaces.<br />
Definition 4.10 (Hyperplane). Let a ∈ R n be a constant vector in n-dimensional space<br />
and let b ∈ R be a constant scalar. The set of points<br />
(4.6) H = x ∈ R n |a T x = b <br />
is a hyperplane in n-dimensional space. Note the use of column vectors for a and x in this<br />
definition.<br />
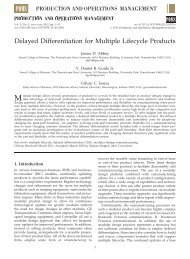
Example 4.11. Consider the hyper-plane 2x1+3x2+x3 = 5. This is shown in Figure 4.3.<br />
This hyperplane is composed of the set of points (x1, x2, x3) ∈ R 3 satisfying 2x1+3x2+x3 = 5.<br />
This can be plotted implicitly or explicitly by solving for one of the variables, say x3. We<br />
can write x3 as a function of the other two variables as:<br />
(4.7) x3 = 5 − 2x1 − 3x2<br />
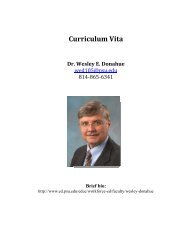
Definition 4.12 (Half-Space). Let a ∈ R n be a constant vector in n-dimensional space<br />
and let b ∈ R be a constant scalar. The sets of points<br />
Hl = x ∈ R n |a T x ≤ b <br />
(4.8)<br />
Hu = x ∈ R n |a T x ≥ b <br />
(4.9)<br />
are the half-spaces defined by the hyperplane a T x = b.<br />
53