CANopen Manager / Slave Manual - esd electronics, Inc.
CANopen Manager / Slave Manual - esd electronics, Inc.
CANopen Manager / Slave Manual - esd electronics, Inc.

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>CANopen</strong>-<strong>Slave</strong><br />
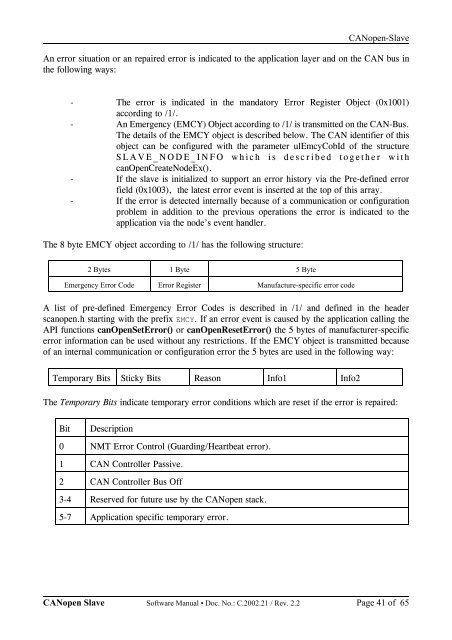
An error situation or an repaired error is indicated to the application layer and on the CAN bus in<br />
the following ways:<br />
- The error is indicated in the mandatory Error Register Object (0x1001)<br />
according to /1/.<br />
- An Emergency (EMCY) Object according to /1/ is transmitted on the CAN-Bus.<br />
The details of the EMCY object is described below. The CAN identifier of this<br />
object can be configured with the parameter ulEmcyCobId of the structure<br />
SLAVE_NODE_INFO which is described together with<br />
canOpenCreateNodeEx().<br />
- If the slave is initialized to support an error history via the Pre-defined error<br />
field (0x1003), the latest error event is inserted at the top of this array.<br />
- If the error is detected internally because of a communication or configuration<br />
problem in addition to the previous operations the error is indicated to the<br />
application via the node’s event handler.<br />
The 8 byte EMCY object according to /1/ has the following structure:<br />
2 Bytes 1 Byte 5 Byte<br />
Emergency Error Code Error Register Manufacture-specific error code<br />
A list of pre-defined Emergency Error Codes is described in /1/ and defined in the header<br />
scanopen.h starting with the prefix EMCY. If an error event is caused by the application calling the<br />
API functions canOpenSetError() or canOpenResetError() the 5 bytes of manufacturer-specific<br />
error information can be used without any restrictions. If the EMCY object is transmitted because<br />
of an internal communication or configuration error the 5 bytes are used in the following way:<br />
Temporary Bits Sticky Bits Reason Info1 Info2<br />
The Temporary Bits indicate temporary error conditions which are reset if the error is repaired:<br />
Bit Description<br />
0 NMT Error Control (Guarding/Heartbeat error).<br />
1 CAN Controller Passive.<br />
2 CAN Controller Bus Off<br />
3-4 Reserved for future use by the <strong>CANopen</strong> stack.<br />
5-7 Application specific temporary error.<br />
<strong>CANopen</strong> <strong>Slave</strong> Software <strong>Manual</strong> • Doc. No.: C.2002.21 / Rev. 2.2 Page 41 of 65