

Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
2. Voltage Source <strong>Converter</strong>s – VSC<br />
dΩ<br />
dt<br />
1 ⎡<br />
⎢ p<br />
J ⎣<br />
m<br />
⎛ L<br />
Im<br />
⎜<br />
⎝ L<br />
⎞<br />
⎟ − M<br />
⎠<br />
m<br />
S M<br />
=<br />
b<br />
Ψ *<br />
rdqISdq<br />
L<br />
2<br />
r<br />
⎤<br />
⎥ , (2.26)<br />
⎦<br />
where, the electromagnetic torque developed by the IM is expressed by:<br />
M<br />
m<br />
L<br />
m<br />
L<br />
S M<br />
S M<br />
e<br />
= pb<br />
Ψ<br />
r<br />
ISq<br />
= pb<br />
Ψ<br />
r<br />
I<br />
S<br />
sin<br />
I<br />
L<br />
s<br />
(2.27)<br />
2<br />
r<br />
2 Lr<br />
Additionally, an angular slip frequency can be described as:<br />
Ω = ΩΨ − Ω<br />
(2.28)<br />
r<br />
p b<br />
r<br />
m<br />
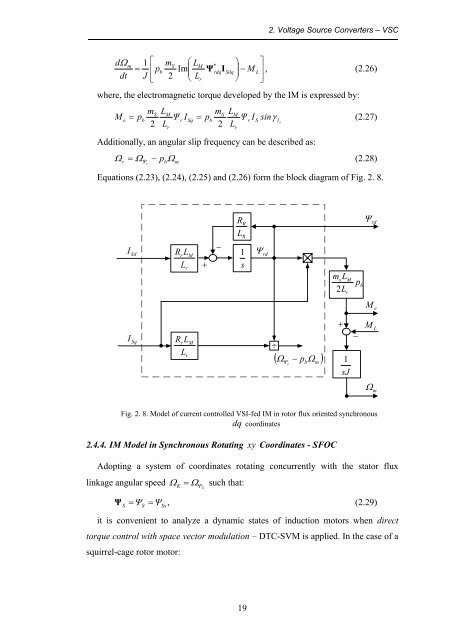
Equations (2.23), (2.24), (2.25) <strong>and</strong> (2.26) form the block diagram <strong>of</strong> Fig. 2. 8.<br />
γ<br />
ISd<br />
Rr<br />
L<br />
L<br />
r<br />
M<br />
+<br />
−<br />
R<br />
R<br />
RL<br />
S R<br />
1<br />
s<br />
Ψrd<br />
msL<br />
2L<br />
M<br />
r<br />
p<br />
b<br />
Ψ rd<br />
M e<br />
I Sq<br />
Rr<br />
L<br />
L<br />
r<br />
M<br />
÷<br />
( − Ω )<br />
Ω Ψ<br />
r<br />
p b<br />
m<br />
+<br />
1<br />
sJ<br />
−<br />
M L<br />
Ω m<br />
Fig. 2. 8. Model <strong>of</strong> current controlled VSI-fed IM in rotor flux oriented synchronous<br />
dq coordinates<br />
2.4.4. IM Model in Synchronous Rotating xy Coordinates - SFOC<br />
Adopting a system <strong>of</strong> coordinates rotating concurrently with the stator flux<br />
linkage angular speed Ω = Ω such that:<br />
S<br />
S<br />
Sx,<br />
K<br />
Ψ<br />
S<br />
Ψ =Ψ = Ψ<br />
(2.29)<br />
it is convenient to analyze a dynamic states <strong>of</strong> induction motors when direct<br />
torque control with space vector modulation – DTC-SVM is applied. In the case <strong>of</strong> a<br />
squirrel-cage rotor motor:<br />
19













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
