

Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3. Vector <strong>Control</strong> Methods <strong>of</strong> <strong>AC</strong>/<strong>DC</strong>/<strong>AC</strong> <strong>Converter</strong>-<strong>Fed</strong> IM Drives – A Review<br />
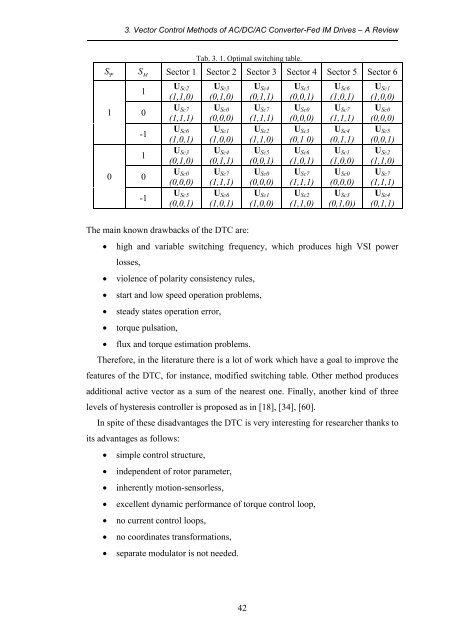
Tab. 3. 1. Optimal switching table.<br />
S<br />
Ψ<br />
S<br />
M Sector 1 Sector 2 Sector 3 Sector 4 Sector 5 Sector 6<br />
1<br />
U Sc2<br />
(1,1,0)<br />
U Sc3<br />
(0,1,0)<br />
U Sc4<br />
(0,1,1)<br />
U Sc5<br />
(0,0,1)<br />
U Sc6<br />
(1,0,1)<br />
U Sc1<br />
(1,0,0)<br />
1<br />
0<br />
U Sc7<br />
(1,1,1)<br />
U Sc0<br />
(0,0,0)<br />
U Sc7<br />
(1,1,1)<br />
U Sc0<br />
(0,0,0)<br />
U Sc7<br />
(1,1,1)<br />
U Sc0<br />
(0,0,0)<br />
-1<br />
U Sc6<br />
(1,0,1)<br />
U Sc1<br />
(1,0,0)<br />
U Sc2<br />
(1,1,0)<br />
U Sc3<br />
(0,1 0)<br />
U Sc4<br />
(0,1,1)<br />
U Sc5<br />
(0,0,1)<br />
1<br />
U Sc3<br />
(0,1,0)<br />
U Sc4<br />
(0,1,1)<br />
U Sc5<br />
(0,0,1)<br />
U Sc6<br />
(1,0,1)<br />
U Sc1<br />
(1,0,0)<br />
U Sc2<br />
(1,1,0)<br />
0<br />
0<br />
U Sc0<br />
(0,0,0)<br />
U Sc7<br />
(1,1,1)<br />
U Sc0<br />
(0,0,0)<br />
U Sc7<br />
(1,1,1)<br />
U Sc0<br />
(0,0,0)<br />
U Sc7<br />
(1,1,1)<br />
-1<br />
U Sc5<br />
(0,0,1)<br />
U Sc6<br />
(1,0,1)<br />
U Sc1<br />
(1,0,0)<br />
U Sc2<br />
(1,1,0)<br />
U Sc3<br />
(0,1,0))<br />
U Sc4<br />
(0,1,1)<br />
The main known drawbacks <strong>of</strong> the DTC are:<br />
• high <strong>and</strong> variable switching frequency, which produces high VSI power<br />
losses,<br />
• violence <strong>of</strong> polarity consistency rules,<br />
• start <strong>and</strong> low speed operation problems,<br />
• steady states operation error,<br />
• torque pulsation,<br />
• flux <strong>and</strong> torque estimation problems.<br />
Therefore, in the literature there is a lot <strong>of</strong> work which have a goal to improve the<br />
features <strong>of</strong> the DTC, for instance, modified switching table. Other method produces<br />
additional active vector as a sum <strong>of</strong> the nearest one. Finally, another kind <strong>of</strong> three<br />
levels <strong>of</strong> hysteresis controller is proposed as in [18], [34], [60].<br />
In spite <strong>of</strong> these disadvantages the DTC is very interesting for researcher thanks to<br />
its advantages as follows:<br />
• simple control structure,<br />
• independent <strong>of</strong> rotor parameter,<br />
• inherently motion-sensorless,<br />
• excellent dynamic performance <strong>of</strong> torque control loop,<br />
• no current control loops,<br />
• no coordinates transformations,<br />
• separate modulator is not needed.<br />
42













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
