

Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
3. Vector <strong>Control</strong> Methods <strong>of</strong> <strong>AC</strong>/<strong>DC</strong>/<strong>AC</strong> <strong>Converter</strong>-<strong>Fed</strong> IM Drives – A Review<br />
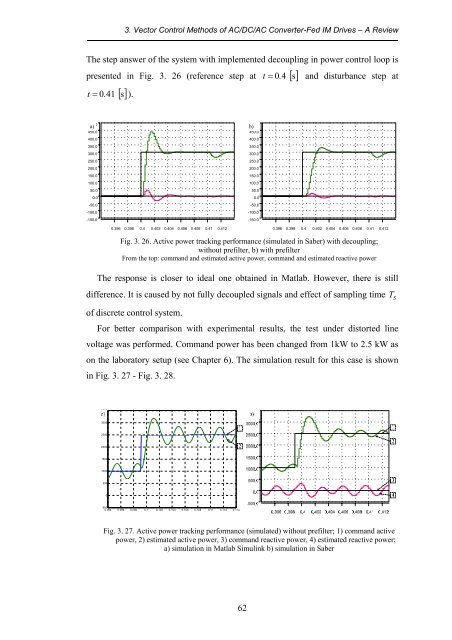
The step answer <strong>of</strong> the system with implemented decoupling in power control loop is<br />
presented in Fig. 3. 26 (reference step at 0.4 [ s]<br />
[] s<br />
t = 0.41 ).<br />
t = <strong>and</strong> disturbance step at<br />
500.0<br />
a)<br />
450.0<br />
400.0<br />
350.0<br />
300.0<br />
250.0<br />
200.0<br />
150.0<br />
100.0<br />
50.0<br />
0.0<br />
-50.0<br />
-100.0<br />
-150.0<br />
500.0<br />
b)<br />
450.0<br />
400.0<br />
350.0<br />
300.0<br />
250.0<br />
200.0<br />
150.0<br />
100.0<br />
50.0<br />
0.0<br />
-50.0<br />
-100.0<br />
-150.0<br />
0.396 0.398 0.4 0.402 0.404 0.406 0.408 0.41 0.412<br />
0.396 0.398 0.4 0.402 0.404 0.406 0.408 0.41 0.412<br />
Fig. 3. 26. Active power tracking performance (simulated in Saber) with decoupling;<br />
without prefilter, b) with prefilter<br />
From the top: comm<strong>and</strong> <strong>and</strong> estimated active power, comm<strong>and</strong> <strong>and</strong> estimated reactive power<br />
The response is closer to ideal one obtained in Matlab. However, there is still<br />
difference. It is caused by not fully decoupled signals <strong>and</strong> effect <strong>of</strong> sampling time T<br />
S<br />
<strong>of</strong> discrete control system.<br />
For better comparison with experimental results, the test under distorted line<br />
voltage was performed. Comm<strong>and</strong> power has been changed from 1kW to 2.5 kW as<br />
on the laboratory setup (see Chapter 6). The simulation result for this case is shown<br />
in Fig. 3. 27 - Fig. 3. 28.<br />
3500<br />
3000<br />
2500<br />
2000<br />
1500<br />
1000<br />
500<br />
0<br />
-500<br />
0.094 0.096 0.098 0.1 0.102 0.104 0.106 0.108 0.11 0.112 0.114<br />
Fig. 3. 27. Active power tracking performance (simulated) without prefilter; 1) comm<strong>and</strong> active<br />
power, 2) estimated active power, 3) comm<strong>and</strong> reactive power, 4) estimated reactive power;<br />
a) simulation in Matlab Simulink b) simulation in Saber<br />
62













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
