

Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...
Direct Power and Torque Control of AC/DC/AC Converter-Fed ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
4. <strong>Direct</strong> <strong>Power</strong> <strong>and</strong> <strong>Torque</strong> <strong>Control</strong> with Space Vector Modulation – DPTC-SVM<br />
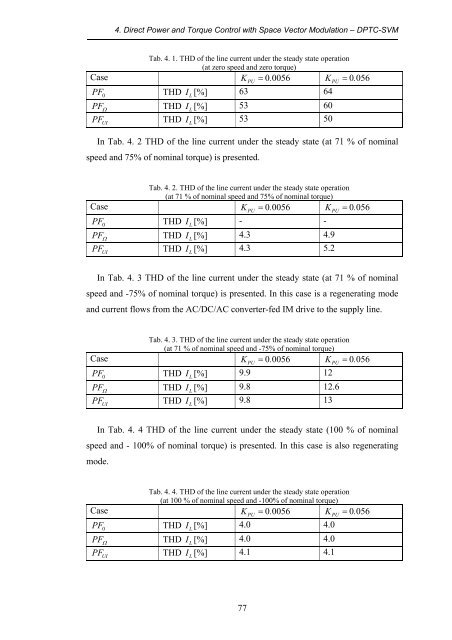
Tab. 4. 1. THD <strong>of</strong> the line current under the steady state operation<br />
(at zero speed <strong>and</strong> zero torque)<br />
Case K PU<br />
= 0. 0056 K PU<br />
= 0. 056<br />
PF<br />
0<br />
PF<br />
Ω<br />
PF<br />
UI<br />
THD<br />
L<br />
THD I<br />
L<br />
[%] 63 64<br />
THD I<br />
L<br />
[%] 53 60<br />
I [%] 53 50<br />
In Tab. 4. 2 THD <strong>of</strong> the line current under the steady state (at 71 % <strong>of</strong> nominal<br />
speed <strong>and</strong> 75% <strong>of</strong> nominal torque) is presented.<br />
Tab. 4. 2. THD <strong>of</strong> the line current under the steady state operation<br />
(at 71 % <strong>of</strong> nominal speed <strong>and</strong> 75% <strong>of</strong> nominal torque)<br />
Case K PU<br />
= 0. 0056 K PU<br />
= 0. 056<br />
PF<br />
0<br />
PF<br />
Ω<br />
PF<br />
UI<br />
THD<br />
L<br />
THD I<br />
L<br />
[%] - -<br />
THD I<br />
L<br />
[%] 4.3 4.9<br />
I [%] 4.3 5.2<br />
In Tab. 4. 3 THD <strong>of</strong> the line current under the steady state (at 71 % <strong>of</strong> nominal<br />
speed <strong>and</strong> -75% <strong>of</strong> nominal torque) is presented. In this case is a regenerating mode<br />
<strong>and</strong> current flows from the <strong>AC</strong>/<strong>DC</strong>/<strong>AC</strong> converter-fed IM drive to the supply line.<br />
Tab. 4. 3. THD <strong>of</strong> the line current under the steady state operation<br />
(at 71 % <strong>of</strong> nominal speed <strong>and</strong> -75% <strong>of</strong> nominal torque)<br />
Case K PU<br />
= 0. 0056 K PU<br />
= 0. 056<br />
PF<br />
0<br />
PF<br />
Ω<br />
PF THD<br />
L<br />
UI<br />
THD I<br />
L<br />
[%] 9.9 12<br />
THD I<br />
L<br />
[%] 9.8 12.6<br />
I [%] 9.8 13<br />
In Tab. 4. 4 THD <strong>of</strong> the line current under the steady state (100 % <strong>of</strong> nominal<br />
speed <strong>and</strong> - 100% <strong>of</strong> nominal torque) is presented. In this case is also regenerating<br />
mode.<br />
Tab. 4. 4. THD <strong>of</strong> the line current under the steady state operation<br />
(at 100 % <strong>of</strong> nominal speed <strong>and</strong> -100% <strong>of</strong> nominal torque)<br />
Case K PU<br />
= 0. 0056 K PU<br />
= 0. 056<br />
PF<br />
0<br />
PF<br />
Ω<br />
PF<br />
UI<br />
THD<br />
L<br />
THD I<br />
L<br />
[%] 4.0 4.0<br />
THD I<br />
L<br />
[%] 4.0 4.0<br />
I [%] 4.1 4.1<br />
77













![[TCP] Opis układu - Instytut Sterowania i Elektroniki Przemysłowej ...](https://img.yumpu.com/23535443/1/184x260/tcp-opis-ukladu-instytut-sterowania-i-elektroniki-przemyslowej-.jpg?quality=85)
