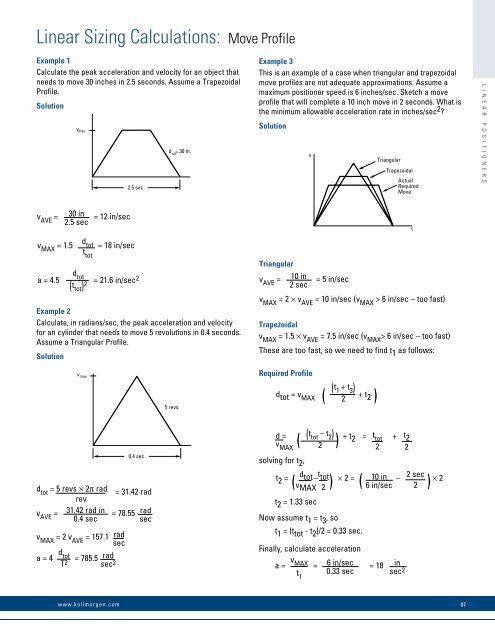
<strong>Linear</strong> Sizing Calculations: Move ProfileL I N E A R P O S I T I O N E R SRotary and linear positioner selection begins with thecalculation of speed, thrust and torque requirem<strong>en</strong>ts. In orderto determine the torque required, the acceleration of the massbeing moved must be calculated. A “move profile”, or a plot ofload velocity vs. time, is sketched in order to simplify the peakacceleration and peak velocity calculations.Typical Machine CycleVelocityV+V-(1) Total distance,(2) Max velocity,Typical Cycle Time Tt1 t2 t3 t4 t5v MAX =[d tot = v MAX t 1 t+ t 32 2 +2 ]d tott( 1 + t 3)2+ t 2Next CycleTimeThe Move Profile sketch contains some important information:• Peak acceleration is the steepest slope on the curve, in thiscase during t 4 or t 5 .• Maximum velocity is at the highest or lowest point over the<strong>en</strong>tire curve, here at the peak betwe<strong>en</strong> t 4 and t 5 .• Distance is equal to the area under the curve. Area abovethe time axis repres<strong>en</strong>ts distance covered in the positivedirection, while negative distance falls below this axis. Thedistance equation (1) is just a sum of the areas of two trianglesand a rectangle.Trapezoidal and Triangular ProfilesA couple of assumptions can greatly simplify the g<strong>en</strong>eralequations. For the Trapezoidal profile we assume t 1 =t 2 =t 3 ,and for the Triangular we assume t 3 =t 4 . Substituting theseassumptions into equations (2) and (3) yields the equationsshown in the figure below.For a giv<strong>en</strong> distance (or area), a triangular profile requireslower acceleration than the trapezoidal profile. This results ina lower thrust requirem<strong>en</strong>t, and in turn, a smaller motor. On theother hand, the triangular profile’s peak speed is greater thanthe trapezoidal, so for applications where the motor speed is alimiting factor, a trapezoidal profile is usually a better choice.(3) Acceleration,a =v MAXt ACCELThe figure above is an example of a typical machine cycle,and is made up of two Move Profiles; the first is an exampleof a trapezoidal profile, while the second is a triangularprofile. The horizontal axis repres<strong>en</strong>ts time and the verticalaxis repres<strong>en</strong>ts velocity (linear or rotary). The load acceleratesfor a time (t 1 ), has a constant velocity or slew section (t 2 ),and decelerates to a stop (t 3 ). There it dwells for a time,accelerates in the negative direction (t 4 ), and deceleratesback to a stop (t 5 ) without a slew region. The equationsneeded to calculate Peak Velocity and Acceleration for ag<strong>en</strong>eral trapezoidal profile are shown in the figure. A triangularprofile can be thought of as a trapezoidal profile where t 2 = 0.Trapezoidal Move Profilev maxv avgad tott 2Velocity(in/sec)Triangular Move ProfileV maxV avgVelocity(in/sec)t 1 t 3aT (time in sec)t 1 t 3T (time in sec)d totv d AVE = tott tott 1 = t 2= t 3 =t tot3v d MAX = 1.5 tot = 1.5v t AVEtotda = 4.5 tot( t tot) 2v AVE =t 1 = t 3 =v MAX =a =4d tot( t tot) 2d tott tott tot22d tott tot=2v MAXt tott 2 = 0= 2 v AVE86K O L L M O R G E N
<strong>Linear</strong> Sizing Calculations: Move ProfileExample 1Calculate the peak acceleration and velocity for an object thatneeds to move 30 inches in 2.5 seconds. Assume a TrapezoidalProfile.Solutionv max2.5 sec.d = 30 in.totExample 3This is an example of a case wh<strong>en</strong> triangular and trapezoidalmove profiles are not adequate approximations. Assume amaximum positioner speed is 6 inches/sec. Sketch a moveprofile that will complete a 10 inch move in 2 seconds. What isthe minimum allowable acceleration rate in inches/sec 2 ?SolutionvTriangularTrapezoidalActualRequiredMoveL I N E A R P O S I T I O N E R Sv AVE =30 in2.5 sec= 12 in/sectv MAX = 1.5d totd tott tot= 18 in/secExample 2Calculate, in radians/sec, the peak acceleration and velocityfor an cylinder that needs to move 5 revolutions in 0.4 seconds.Assume a Triangular Profile.SolutionTriangularv AVE =10 in2 sec= 5 in/secv MAX = 2 × v AVE = 10 in/sec (v MAX > 6 in/sec – too fast)Trapezoidalv MAX = 1.5 × v AVE = 7.5 in/sec (v MAX > 6 in/sec – too fast)These are too fast, so we need to find t 1 as follows:a = 4.5 = 21.6 in/sec 2 in( t tot) 2 ( t tot – t 2)v max5 revsRequired Profile( t 1 + t 3)( 2 )d tot = v MAX + t 2d tot = 5 revs × 2π rad = 31.42 radrevv 31.42 rad in radAVE = = 78.550.4 secsecv radMAX = 2 v AVE = 157.1secda = 4 tot = 785.5 radT2 sec20.4 sec.d = + t 2 = t tot +22v MAX( )solving for t 2 ,( ) ( )td tot t tot2 sec2 = – × 2 10 inv = MAX 26 in/sec– 2× 2t 2 = 1.33 secNow assume t 1 = t 3 , sot 1 = (t tot - t 2 )/2 = 0.33 sec.Finally, calculate accelerationva = MAX = 6 in/sec = 18t 0.33 sec1sec2t 22www.kollmorg<strong>en</strong>.com87