Linear Positioners Catalog_en-US_revA - Kollmorgen
Linear Positioners Catalog_en-US_revA - Kollmorgen
Linear Positioners Catalog_en-US_revA - Kollmorgen

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
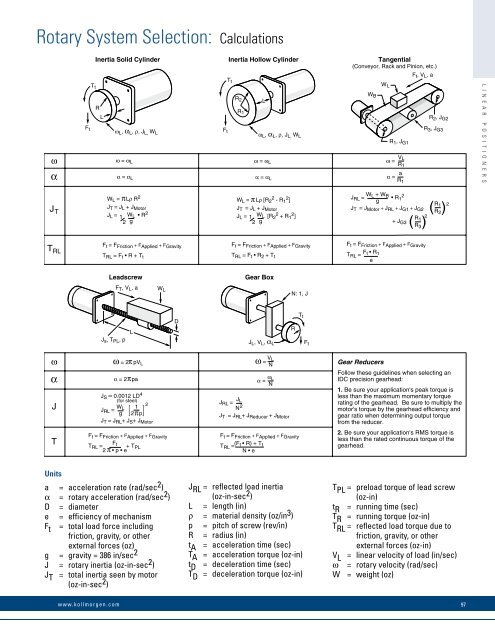
Rotary System Selection: CalculationsInertia Solid Cylinder Inertia Hollow Cylinder Tang<strong>en</strong>tial(Conveyor, Rack and Pinion, etc.)F t , V L , aωαF tT tRLR 2R 1J RL =T tω L , α L , ρ, J L, W LF tω L , α L , ρ, J L, W LR 1 , J G1ω = ω L ω = ω L ω = V LR 1α = α L α = α L α = a R 1• R 2 1LW BW LR 2 , J G2R 3 , J G3L I N E A R P O S I T I O N E R SW L = Lρ R 2JJ T = J L + J MotorTJ L = 1W • R 2 L2 gW L = Lρ [R 2 2 - R 2 1 ]J T = J L + J MotorJ L = [R 21W L 2 + R 2 1 ]2 gW L + W BgJ T = J Motor + J RL + J G1 + J G2R 2+ J 1 G3R 3( )( )R 1 2R 2T RLF t = F Friction + F Applied + F GravityT RL = F t • R + T tF t = F Friction + F Applied + F GravityT RL = F t • R 2 + T tF t = F Friction + F Applied + F GravityT RL = F t • R 1eLeadscrewGear BoxF T , V L , aW LN: 1, JJ s , T PL , pLDJ L , V L , α LRT tF tωαJω = 2 pV Lα = 2 paJ S 0.0012 LD 4(for steel)J RL = W 2L 1g 2 pJ T = J RL + J S + J Motorω = V LNα = α LNJ RL = J LN 2J T = J RL + J Reducer + J MotorGear ReducersFollow these guidelines wh<strong>en</strong> selecting anIDC precision gearhead:1. Be sure your application's peak torque isless than the maximum mom<strong>en</strong>tary torquerating of the gearhead. Be sure to multiply themotor's torque by the gearhead effici<strong>en</strong>cy andgear ratio wh<strong>en</strong> determining output torquefrom the reducer.TF t = F Friction + F Applied + F GravityFT RL = t + T PL2 • p • eF t = F Friction + F Applied + F GravityT RL = (F t • R) + T tN • e2. Be sure your application's RMS torque isless than the rated continuous torque of thegearhead.Unitsa = acceleration rate (rad/sec 2 )α = rotary acceleration (rad/sec 2 )D = diametere = effici<strong>en</strong>cy of mechanismF t = total load force includingfriction, gravity, or otherexternal forces (oz)g = gravity = 386 in/sec 2J = rotary inertia (oz-in-sec 2 )J T = total inertia se<strong>en</strong> by motor(oz-in-sec 2 )J RL = reflected load inertia(oz-in-sec 2 )L = l<strong>en</strong>gth (in)ρ = material d<strong>en</strong>sity (oz/in 3 )p = pitch of screw (rev/in)R = radius (in)t A = acceleration time (sec)T A = acceleration torque (oz-in)t D = deceleration time (sec)T D = deceleration torque (oz-in)T PL = preload torque of lead screw(oz-in)t R = running time (sec)T R = running torque (oz-in)T RL = reflected load torque due tofriction, gravity, or otherexternal forces (oz-in)V L = linear velocity of load (in/sec)ω = rotary velocity (rad/sec)W = weight (oz)www.kollmorg<strong>en</strong>.com97