

DIFFERENTIAL GEOMETRY: A First Course in Curves and Surfaces
DIFFERENTIAL GEOMETRY: A First Course in Curves and Surfaces
DIFFERENTIAL GEOMETRY: A First Course in Curves and Surfaces

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
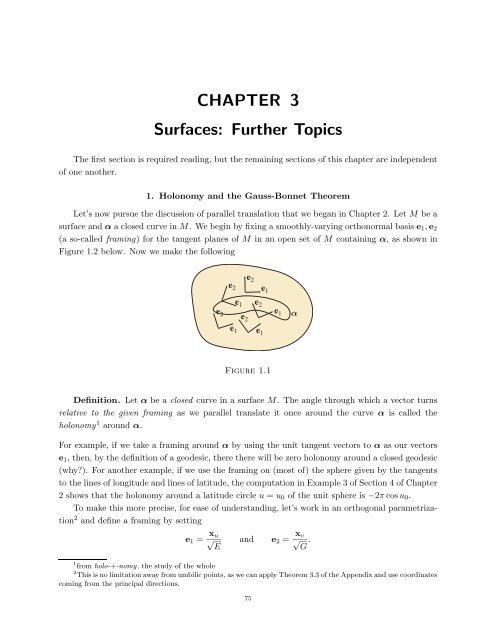
CHAPTER 3<strong>Surfaces</strong>: Further TopicsThe first section is required read<strong>in</strong>g, but the rema<strong>in</strong><strong>in</strong>g sections of this chapter are <strong>in</strong>dependentof one another.1. Holonomy <strong>and</strong> the Gauss-Bonnet TheoremLet’s now pursue the discussion of parallel translation that we began <strong>in</strong> Chapter 2. Let M be asurface <strong>and</strong> α a closed curve <strong>in</strong> M. Webeg<strong>in</strong> by fix<strong>in</strong>g a smoothly-vary<strong>in</strong>g orthonormal basis e 1 , e 2(a so-called fram<strong>in</strong>g) for the tangent planes of M <strong>in</strong> an open set of M conta<strong>in</strong><strong>in</strong>g α, asshown <strong>in</strong>Figure 1.2 below. Now we make the follow<strong>in</strong>ge 2e 2e 2e 1 e 2e 1ee 12e 1e 1αFigure 1.1Def<strong>in</strong>ition. Let α be a closed curve <strong>in</strong> a surface M. The angle through which a vector turnsrelative to the given fram<strong>in</strong>g as we parallel translate it once around the curve α is called theholonomy 1 around α.For example, if we take a fram<strong>in</strong>g around α by us<strong>in</strong>g the unit tangent vectors to α as our vectorse 1 , then, by the def<strong>in</strong>ition of a geodesic, there there will be zero holonomy around a closed geodesic(why?). For another example, if we use the fram<strong>in</strong>g on (most of) the sphere given by the tangentsto the l<strong>in</strong>es of longitude <strong>and</strong> l<strong>in</strong>es of latitude, the computation <strong>in</strong> Example 3 of Section 4 of Chapter2 shows that the holonomy around a latitude circle u = u 0 of the unit sphere is −2π cos u 0 .To make this more precise, for ease of underst<strong>and</strong><strong>in</strong>g, let’s work <strong>in</strong> an orthogonal parametrization2 <strong>and</strong> def<strong>in</strong>e a fram<strong>in</strong>g by sett<strong>in</strong>ge 1 = x u√E<strong>and</strong> e 2 = x v√G.1 from holo-+-nomy, the study of the whole2 This is no limitation away from umbilic po<strong>in</strong>ts, as we can apply Theorem 3.3 of the Appendix <strong>and</strong> use coord<strong>in</strong>atescom<strong>in</strong>g from the pr<strong>in</strong>cipal directions.75














