

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
motor for the application planned.<br />
14.2.3 Permanent magnet synchronous motor<br />
In applications with small <strong>and</strong> medium power drives permanent magnet synchronous motors (PMSM) have<br />
replaced st<strong>and</strong>ard DC motors today. This is due to the advantages PMSM provide, e.g. service free, high<br />
torque <strong>and</strong> overload capacity because of the missing mechanical commutation. In addition PMSM are better<br />
able to dissipate heat since the stator windings are oriented to the housing. This results in a high ratio of<br />
torque to housing size. On the other h<strong>and</strong> motor control for PMSM is highly complex <strong>and</strong> expensive.<br />
14.3 Control techniques, Interfacing, st<strong>and</strong>ardised drive modules<br />
The control techniques for electromagnetic motors have been widely discussed in science. Vector modulation<br />
is the state of the art for PMSM making precise motor current control possible. The available feedback<br />
systems are based on incremental encoders or resolvers. Absolute encoders have been widely introduced, but<br />
are not available as st<strong>and</strong>ard components for small sized drives yet.<br />
Most smart actuator solutions are based on simple two-wire bus communication such as the CAN bus,<br />
Profibus or other field bus systems. Recently Ethernet based smart actuators have been presented. In order to<br />
provide real time interfacing new transport layer protocols have been introduced according to the OSI/ISO<br />
layer model, e.g. Ethercat, Ethernet/IP, Profinet or SercosIII.<br />
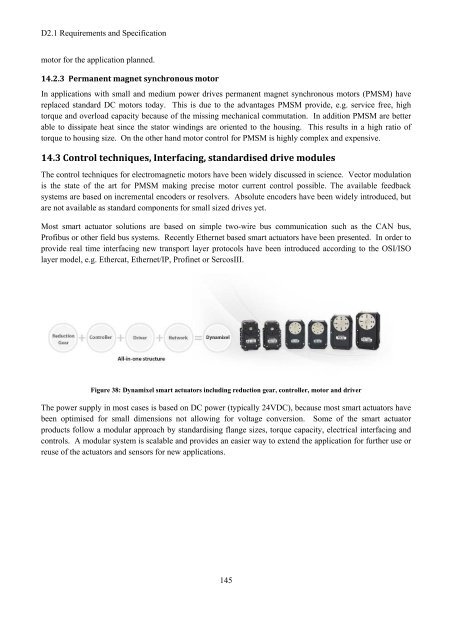
Figure 38: Dynamixel smart actuators including reduction gear, controller, motor <strong>and</strong> driver<br />
The power supply in most cases is based on DC power (typically 24VDC), because most smart actuators have<br />
been optimised for small dimensions not allowing for voltage conversion. Some of the smart actuator<br />
products follow a modular approach by st<strong>and</strong>ardising flange sizes, torque capacity, electrical interfacing <strong>and</strong><br />
controls. A modular system is scalable <strong>and</strong> provides an easier way to extend the application for further use or<br />
reuse of the actuators <strong>and</strong> sensors for new applications.<br />
145