

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
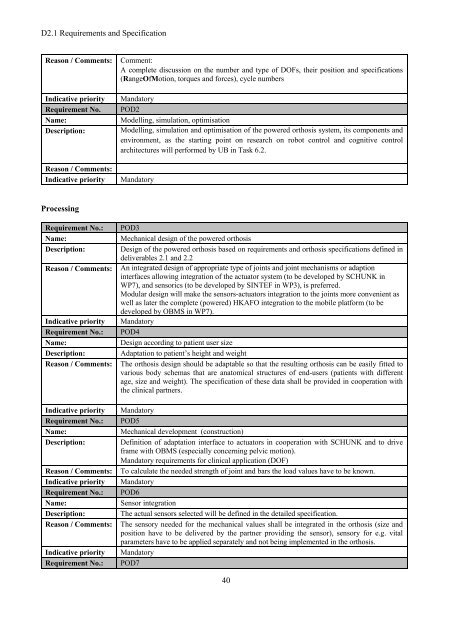
Reason / Comments: Comment:<br />
A complete discussion on the number <strong>and</strong> type of DOFs, their position <strong>and</strong> specifications<br />
(RangeOfMotion, torques <strong>and</strong> forces), cycle numbers<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. POD2<br />
Name: Modelling, simulation, optimisation<br />
Description: Modelling, simulation <strong>and</strong> optimisation of the powered orthosis system, its components <strong>and</strong><br />
environment, as the starting point on research on robot control <strong>and</strong> cognitive control<br />
architectures will performed by UB in Task 6.2.<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Processing<br />
Requirement No.: POD3<br />
Name: Mechanical design of the powered orthosis<br />
Description: Design of the powered orthosis based on requirements <strong>and</strong> orthosis specifications defined in<br />
deliverables 2.1 <strong>and</strong> 2.2<br />
Reason / Comments: An integrated design of appropriate type of joints <strong>and</strong> joint mechanisms or adaption<br />
interfaces allowing integration of the actuator system (to be developed by SCHUNK in<br />
WP7), <strong>and</strong> sensorics (to be developed by SINTEF in WP3), is preferred.<br />
Modular design will make the sensors-actuators integration to the joints more convenient as<br />
well as later the complete (powered) HKAFO integration to the mobile platform (to be<br />
developed by OBMS in WP7).<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: POD4<br />
Name: Design according to patient user size<br />
Description: Adaptation to patient’s height <strong>and</strong> weight<br />
Reason / Comments: The orthosis design should be adaptable so that the resulting orthosis can be easily fitted to<br />
various body schemas that are anatomical structures of end-users (patients with different<br />
age, size <strong>and</strong> weight). The specification of these data shall be provided in cooperation with<br />
the clinical partners.<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: POD5<br />
Name: Mechanical development (construction)<br />
Description: Definition of adaptation interface to actuators in cooperation with SCHUNK <strong>and</strong> to drive<br />
frame with OBMS (especially concerning pelvic motion).<br />
M<strong>and</strong>atory requirements for clinical application (DOF)<br />
Reason / Comments: To calculate the needed strength of joint <strong>and</strong> bars the load values have to be known.<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: POD6<br />
Name: Sensor integration<br />
Description: The actual sensors selected will be defined in the detailed specification.<br />
Reason / Comments: The sensory needed for the mechanical values shall be integrated in the orthosis (size <strong>and</strong><br />
position have to be delivered by the partner providing the sensor), sensory for e.g. vital<br />
parameters have to be applied separately <strong>and</strong> not being implemented in the orthosis.<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: POD7<br />
40