

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
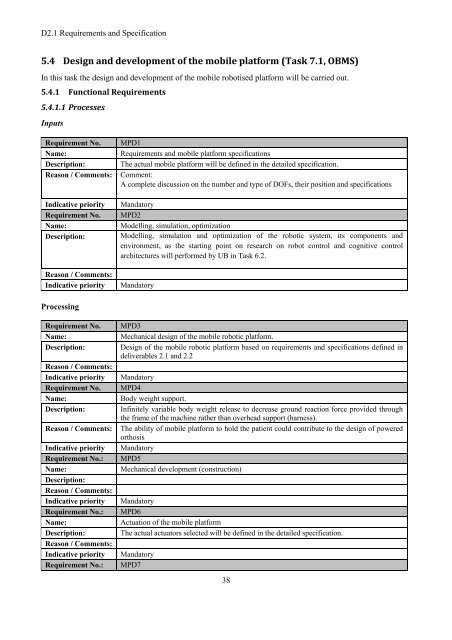
5.4 Design <strong>and</strong> development of the mobile platform (Task 7.1, OBMS)<br />
In this task the design <strong>and</strong> development of the mobile robotised platform will be carried out.<br />
5.4.1 Functional <strong>Requirements</strong><br />
5.4.1.1 Processes<br />
Inputs<br />
Requirement No. MPD1<br />
Name: <strong>Requirements</strong> <strong>and</strong> mobile platform specifications<br />
Description: The actual mobile platform will be defined in the detailed specification.<br />
Reason / Comments: Comment:<br />
A complete discussion on the number <strong>and</strong> type of DOFs, their position <strong>and</strong> specifications<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. MPD2<br />
Name: Modelling, simulation, optimization<br />
Description: Modelling, simulation <strong>and</strong> optimization of the robotic system, its components <strong>and</strong><br />
environment, as the starting point on research on robot control <strong>and</strong> cognitive control<br />
architectures will performed by UB in Task 6.2.<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Processing<br />
Requirement No. MPD3<br />
Name: Mechanical design of the mobile robotic platform.<br />
Description: Design of the mobile robotic platform based on requirements <strong>and</strong> specifications defined in<br />
deliverables 2.1 <strong>and</strong> 2.2<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. MPD4<br />
Name: Body weight support.<br />
Description: Infinitely variable body weight release to decrease ground reaction force provided through<br />
the frame of the machine rather than overhead support (harness).<br />
Reason / Comments: The ability of mobile platform to hold the patient could contribute to the design of powered<br />
orthosis<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: MPD5<br />
Name: Mechanical development (construction)<br />
Description:<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: MPD6<br />
Name: Actuation of the mobile platform<br />
Description: The actual actuators selected will be defined in the detailed specification.<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: MPD7<br />
38