

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
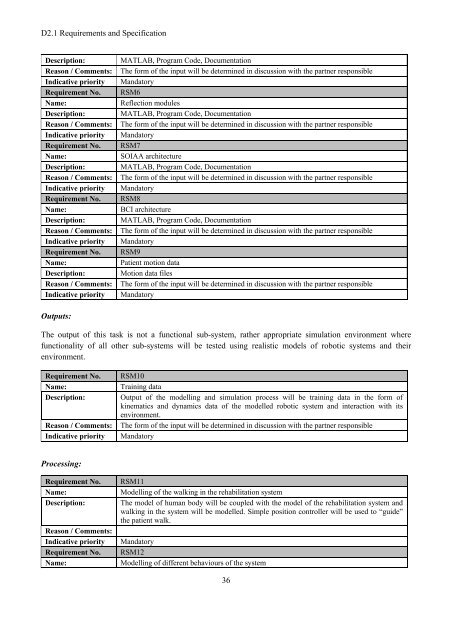
Description: MATLAB, Program Code, Documentation<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. RSM6<br />
Name: Reflection modules<br />
Description: MATLAB, Program Code, Documentation<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. RSM7<br />
Name: SOIAA architecture<br />
Description: MATLAB, Program Code, Documentation<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. RSM8<br />
Name: BCI architecture<br />
Description: MATLAB, Program Code, Documentation<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. RSM9<br />
Name: Patient motion data<br />
Description: Motion data files<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Outputs:<br />
The output of this task is not a functional sub-system, rather appropriate simulation environment where<br />
functionality of all other sub-systems will be tested using realistic models of robotic systems <strong>and</strong> their<br />
environment.<br />
Requirement No. RSM10<br />
Name: Training data<br />
Description: Output of the modelling <strong>and</strong> simulation process will be training data in the form of<br />
kinematics <strong>and</strong> dynamics data of the modelled robotic system <strong>and</strong> interaction with its<br />
environment.<br />
Reason / Comments: The form of the input will be determined in discussion with the partner responsible<br />
Indicative priority M<strong>and</strong>atory<br />
Processing:<br />
Requirement No. RSM11<br />
Name: Modelling of the walking in the rehabilitation system<br />
Description: The model of human body will be coupled with the model of the rehabilitation system <strong>and</strong><br />
walking in the system will be modelled. Simple position controller will be used to “guide”<br />
the patient walk.<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No. RSM12<br />
Name: Modelling of different behaviours of the system<br />
36