

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
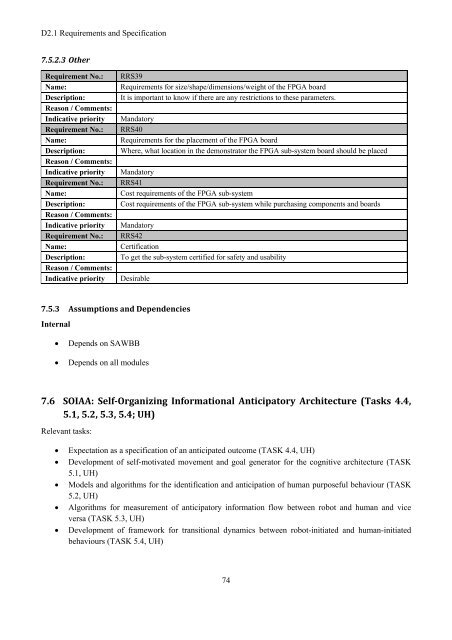
7.5.2.3 Other<br />
Requirement No.: RRS39<br />
Name: <strong>Requirements</strong> for size/shape/dimensions/weight of the FPGA board<br />
Description: It is important to know if there are any restrictions to these parameters.<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: RRS40<br />
Name: <strong>Requirements</strong> for the placement of the FPGA board<br />
Description: Where, what location in the demonstrator the FPGA sub-system board should be placed<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: RRS41<br />
Name: Cost requirements of the FPGA sub-system<br />
Description: Cost requirements of the FPGA sub-system while purchasing components <strong>and</strong> boards<br />
Reason / Comments:<br />
Indicative priority M<strong>and</strong>atory<br />
Requirement No.: RRS42<br />
Name: Certification<br />
Description: To get the sub-system certified for safety <strong>and</strong> usability<br />
Reason / Comments:<br />
Indicative priority Desirable<br />
7.5.3 Assumptions <strong>and</strong> Dependencies<br />
Internal<br />
� Depends on SAWBB<br />
� Depends on all modules<br />
7.6 SOIAA: SelfOrganizing Informational Anticipatory Architecture (Tasks 4.4,<br />
5.1, 5.2, 5.3, 5.4; UH)<br />
Relevant tasks:<br />
� Expectation as a specification of an anticipated outcome (TASK 4.4, UH)<br />
� Development of self-motivated movement <strong>and</strong> goal generator for the cognitive architecture (TASK<br />
5.1, UH)<br />
� Models <strong>and</strong> algorithms for the identification <strong>and</strong> anticipation of human purposeful behaviour (TASK<br />
5.2, UH)<br />
� Algorithms for measurement of anticipatory information flow between robot <strong>and</strong> human <strong>and</strong> vice<br />
versa (TASK 5.3, UH)<br />
� Development of framework for transitional dynamics between robot-initiated <strong>and</strong> human-initiated<br />
behaviours (TASK 5.4, UH)<br />
74