

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
professional user (therapist) is optimizing the patient´s gait with his/her manual techniques, the system is<br />
“learning” the optimal gait applicable for this individual patient (=”teaching mode”). The data relevant<br />
for the support given by the robotic system are transferred to the system. The sensors used as a diagnostic<br />
tool on the treadmill will not be the same as in the robotic system.<br />
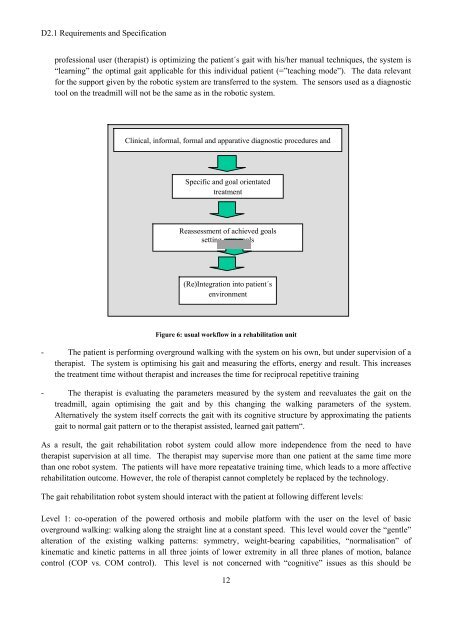
Clinical, informal, formal <strong>and</strong> apparative diagnostic procedures <strong>and</strong><br />
Specific <strong>and</strong> goal orientated<br />
treatment<br />
Reassessment of achieved goals<br />
setting new goals<br />
Figure 6: usual workflow in a rehabilitation unit<br />
- The patient is performing overground walking with the system on his own, but under supervision of a<br />
therapist. The system is optimising his gait <strong>and</strong> measuring the efforts, energy <strong>and</strong> result. This increases<br />
the treatment time without therapist <strong>and</strong> increases the time for reciprocal repetitive training<br />
- The therapist is evaluating the parameters measured by the system <strong>and</strong> reevaluates the gait on the<br />
treadmill, again optimising the gait <strong>and</strong> by this changing the walking parameters of the system.<br />
Alternatively the system itself corrects the gait with its cognitive structure by approximating the patients<br />
gait to normal gait pattern or to the therapist assisted, learned gait pattern“.<br />
As a result, the gait rehabilitation robot system could allow more independence from the need to have<br />
therapist supervision at all time. The therapist may supervise more than one patient at the same time more<br />
than one robot system. The patients will have more repeatative training time, which leads to a more affective<br />
rehabilitation outcome. However, the role of therapist cannot completely be replaced by the technology.<br />
The gait rehabilitation robot system should interact with the patient at following different levels:<br />
Level 1: co-operation of the powered orthosis <strong>and</strong> mobile platform with the user on the level of basic<br />
overground walking: walking along the straight line at a constant speed. This level would cover the “gentle”<br />
alteration of the existing walking patterns: symmetry, weight-bearing capabilities, “normalisation” of<br />
kinematic <strong>and</strong> kinetic patterns in all three joints of lower extremity in all three planes of motion, balance<br />
control (COP vs. COM control). This level is not concerned with “cognitive” issues as this should be<br />
12<br />
Clinical,<br />
(Re)Integration into patient´s<br />
environment