

D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS
D2.1 Requirements and Specification - CORBYS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>D2.1</strong> <strong>Requirements</strong> <strong>and</strong> <strong>Specification</strong><br />
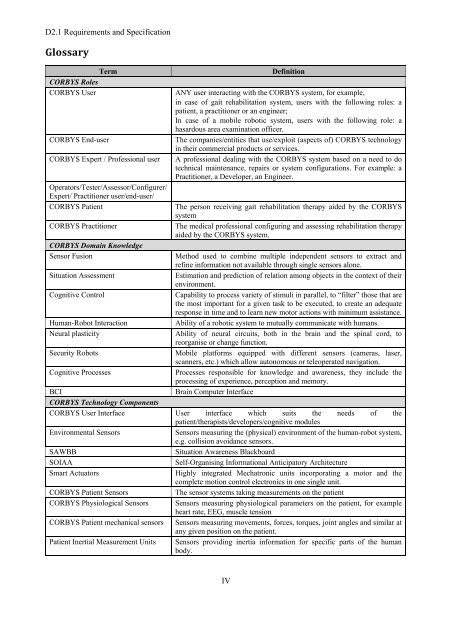
Glossary<br />
Term Definition<br />
<strong>CORBYS</strong> Roles<br />
<strong>CORBYS</strong> User ANY user interacting with the <strong>CORBYS</strong> system, for example,<br />
in case of gait rehabilitation system, users with the following roles: a<br />
patient, a practitioner or an engineer;<br />
In case of a mobile robotic system, users with the following role: a<br />
hasardous area examination officer.<br />
<strong>CORBYS</strong> End-user The companies/entities that use/exploit (aspects of) <strong>CORBYS</strong> technology<br />
in their commercial products or services.<br />
<strong>CORBYS</strong> Expert / Professional user A professional dealing with the <strong>CORBYS</strong> system based on a need to do<br />
technical maintenance, repairs or system configurations. For example: a<br />
Practitioner, a Developer, an Engineer.<br />
Operators/Tester/Assessor/Configurer/<br />
Expert/ Practitioner user/end-user/<br />
<strong>CORBYS</strong> Patient The person receiving gait rehabilitation therapy aided by the <strong>CORBYS</strong><br />
system<br />
<strong>CORBYS</strong> Practitioner The medical professional configuring <strong>and</strong> assessing rehabilitation therapy<br />
aided by the <strong>CORBYS</strong> system.<br />
<strong>CORBYS</strong> Domain Knowledge<br />
Sensor Fusion Method used to combine multiple independent sensors to extract <strong>and</strong><br />
refine information not available through single sensors alone.<br />
Situation Assessment Estimation <strong>and</strong> prediction of relation among objects in the context of their<br />
environment.<br />
Cognitive Control Capability to process variety of stimuli in parallel, to “filter” those that are<br />
the most important for a given task to be executed, to create an adequate<br />
response in time <strong>and</strong> to learn new motor actions with minimum assistance.<br />
Human-Robot Interaction Ability of a robotic system to mutually communicate with humans.<br />
Neural plasticity Ability of neural circuits, both in the brain <strong>and</strong> the spinal cord, to<br />
reorganise or change function.<br />
Security Robots Mobile platforms equipped with different sensors (cameras, laser,<br />
scanners, etc.) which allow autonomous or teleoperated navigation.<br />
Cognitive Processes Processes responsible for knowledge <strong>and</strong> awareness, they include the<br />
processing of experience, perception <strong>and</strong> memory.<br />
BCI Brain Computer Interface<br />
<strong>CORBYS</strong> Technology Components<br />
<strong>CORBYS</strong> User Interface User interface which suits the needs of the<br />
patient/therapists/developers/cognitive modules<br />
Environmental Sensors Sensors measuring the (physical) environment of the human-robot system,<br />
e.g. collision avoidance sensors.<br />
SAWBB Situation Awareness Blackboard<br />
SOIAA Self-Organising Informational Anticipatory Architecture<br />
Smart Actuators Highly integrated Mechatronic units incorporating a motor <strong>and</strong> the<br />
complete motion control electronics in one single unit.<br />
<strong>CORBYS</strong> Patient Sensors The sensor systems taking measurements on the patient<br />
<strong>CORBYS</strong> Physiological Sensors Sensors measuring physiological parameters on the patient, for example<br />
heart rate, EEG, muscle tension<br />
<strong>CORBYS</strong> Patient mechanical sensors Sensors measuring movements, forces, torques, joint angles <strong>and</strong> similar at<br />
any given position on the patient.<br />
Patient Inertial Measurement Units Sensors providing inertia information for specific parts of the human<br />
body.<br />
IV