Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
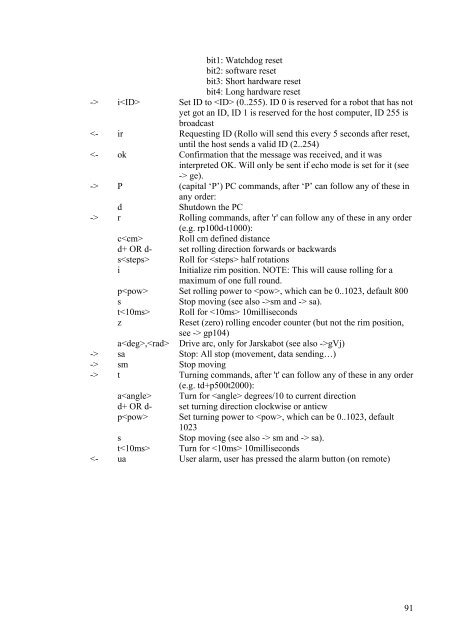
it1: Watchdog resetbit2: software resetbit3: Short hardware resetbit4: Long hardware reset-> i Set ID to (0..255). ID 0 is reserved for a robot that has notyet got an ID, ID 1 is reserved for the host computer, ID 255 isbroadcast P (capital ‘P’) PC commands, after ‘P’ can follow any of these inany order:dShutdown the PC-> r Rolling commands, after 'r' can follow any of these in any order(e.g. rp100d-t1000):c Roll cm defined distanced+ OR d- set rolling direction forwards or backwardss Roll for half rotationsiInitialize rim position. NOTE: This will cause rolling for amaximum of one full round.p Set rolling power to , which can be 0..1023, default 800sStop moving (see also ->sm and -> sa).t Roll for 10millisecondszReset (zero) rolling encoder counter (but not the rim position,see -> gp104)a, Drive arc, only for Jarskabot (see also ->gVj)-> sa Stop: All stop (movement, data sending…)-> sm Stop moving-> t Turning commands, after 't' can follow any of these in any order(e.g. td+p500t2000):a Turn for degrees/10 to current directiond+ OR d- set turning direction clockwise or anticwp Set turning power to , which can be 0..1023, default1023sStop moving (see also -> sm and -> sa).t Turn for 10milliseconds