Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
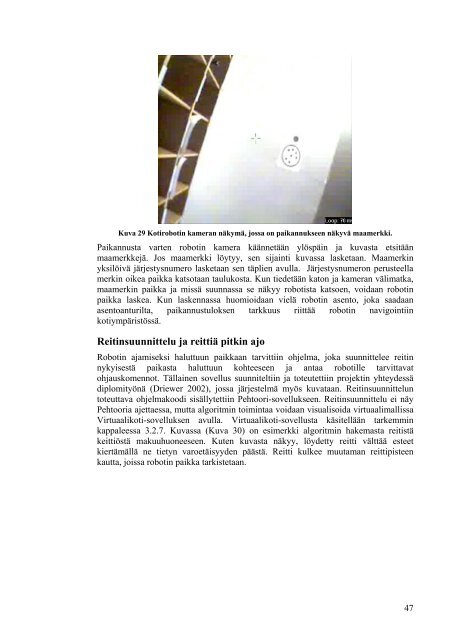
Kuva 29 Kotirobotin kameran näkymä, jossa on paikannukseen näkyvä maamerkki.Paikannusta varten robotin kamera käännetään ylöspäin ja kuvasta etsitäänmaamerkkejä. Jos maamerkki löytyy, sen sijainti kuvassa lasketaan. Maamerkinyksilöivä järjestysnumero lasketaan sen täplien avulla. Järjestysnumeron perusteellamerkin oikea paikka katsotaan taulukosta. Kun tiedetään katon ja kameran välimatka,maamerkin paikka ja missä suunnassa se näkyy robotista katsoen, voidaan robotinpaikka laskea. Kun laskennassa huomioidaan vielä robotin asento, joka saadaanasentoanturilta, paikannustuloksen tarkkuus riittää robotin navigointiinkotiympäristössä.Reitinsuunnittelu ja reittiä pitkin ajoRobotin ajamiseksi haluttuun paikkaan tarvittiin ohjelma, joka suunnittelee reitinnykyisestä paikasta haluttuun kohteeseen ja antaa robotille tarvittavatohjauskomennot. Tällainen sovellus suunniteltiin ja toteutettiin projektin yhteydessädiplomityönä (Driewer 2002), jossa järjestelmä myös kuvataan. Reitinsuunnitteluntoteuttava ohjelmakoodi sisällytettiin Pehtoori-sovellukseen. Reitinsuunnittelu ei näyPehtooria ajettaessa, mutta algoritmin toimintaa voidaan visualisoida virtuaalimallissaVirtuaalikoti-sovelluksen avulla. Virtuaalikoti-sovellusta käsitellään tarkemminkappaleessa 3.2.7. Kuvassa (Kuva 30) on esimerkki algoritmin hakemasta reitistäkeittiöstä makuuhuoneeseen. Kuten kuvasta näkyy, löydetty reitti välttää esteetkiertämällä ne tietyn varoetäisyyden päästä. Reitti kulkee muutaman reittipisteenkautta, joissa robotin paikka tarkistetaan.47