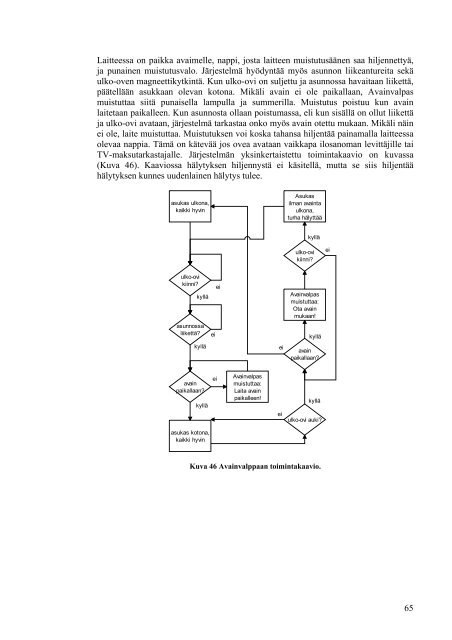
Laitteessa on paikka avaimelle, nappi, josta laitteen muistutusäänen saa hiljennettyä,ja punainen muistutusvalo. Järjestelmä hyödyntää myös asunnon liikeantureita sekäulko-oven magneettikytkintä. Kun ulko-ovi on suljettu ja asunnossa havaitaan liikettä,päätellään asukkaan olevan <strong>kotona</strong>. Mikäli avain ei ole paikallaan, Avainvalpasmuistuttaa siitä punaisella lampulla ja summerilla. Muistutus poistuu kun avainlaitetaan paikalleen. Kun asunnosta ollaan poistumassa, eli kun sisällä on ollut liikettäja ulko-ovi avataan, järjestelmä tarkastaa onko myös avain otettu mukaan. Mikäli näinei ole, laite muistuttaa. Muistutuksen voi koska tahansa hiljentää painamalla laitteessaolevaa nappia. Tämä on kätevää jos ovea avataan vaikkapa ilosanoman levittäjille taiTV-maksutarkastajalle. Järjestelmän yksinkertaistettu toimintakaavio on kuvassa(Kuva 46). Kaaviossa hälytyksen hiljennystä ei käsitellä, mutta se siis hiljentäähälytyksen kunnes uudenlainen hälytys tulee.asukas ulkona,kaikki hyvinAsukasilman avaintaulkona,turha hälyttääkylläulko-ovikiinni?eiulko-ovikiinni?kylläasunnossaliikettä?kylläeieieiAvainvalpasmuistuttaa:Ota avainmukaan!kylläavainpaikallaan?avainpaikallaan?kylläeiAvainvalpasmuistuttaa:Laita avainpaikalleen!eikylläulko-ovi auki?asukas <strong>kotona</strong>,kaikki hyvinKuva 46 Avainvalppaan toimintakaavio.65
4 Tulokset4.1 Järjestelmän toimivuus4.1.1 RolloPallorobotteja on tutkittu maailmalla varsin vähän, muita yliopistotasoisia projektejaon vain kaksi [Roball; Ballbot]. Lisäksi on kehitelty kaupallisia, lähinnäviihdekäyttöön tarkoitettuja laitteita. Rollo on tällä hetkellä kehittynein jamonikäyttöisin olemassa oleva pallorobotti. Rollo onkin saanut huomiotatiedotusvälineissä paitsi Suomessa, myös ulkomailla. Pallomainen muoto onherättänyt ihastusta niin lapsissa kuin aikuisissakin.LiikkuminenRollon ohjaaminen on osoittautunut vaativaksi sen muodosta johtuen. Tasaisellapinnalla oleva homogeeninen pallo on tasapainotilaltaan indifferentti, eli se eipoikkeutettaessa pyri palaamaan takaisin alkutilaan, muttei toisaalta lähdeetääntymäänkään siitä. Kaikki sen tilat ovat tasapainotiloja. Kun massajakauma onepähomogeeninen, kuten Rollossa, tasapainotilasta tulee stabiili. Poikkeutettaessatällaista kappaletta tasapainoasemastaan se pyrkii palaamaan siihen, muttamuodostaan johtuen jää värähtelemään eli keinumaan pituus- ja poikittaisakselinsaympäri. Värähtely vaimenee varsin hitaasti ja on hieman häiritsevää Rollon kamerankuvaa katseltaessa. Poikittaisakselin suhteen tapahtuvaa liikettä voitaisiin paitsiehkäistä, myös aktiivisesti vaimentaa ohjausalgoritmia parantamalla, muttapitkittäisakselin suunnassa tapahtuvaan liikkeeseen ei nykyisellä konstruktiollapystytä vaikuttamaan. Tätä varten tarvittaisiin esimerkiksi poikittaissuunnassaliikuteltava massa, jonka avulla voitaisiin paitsi ohjata suoraan ajettaessa, myösvaimentaa keinumista. Kuitenkin tällainen esimerkiksi akkua liikutteleva konstruktiovie lisää tilaa ja saattaa olla hankala toteuttaa. Aiemmassa Rollon versiossa oli pienierillinen tasapainotusmassa, jota voitiin liikutella sivusuunnassa matoruuvilla, muttaratkaisu jäi kokeilun asteelle. Rollon liikkumista, erityisesti heilumista, on tutkittu jayritetty parantaa projektityössä (Halinen ym. 2001). Kokonaan uudenlaistakonstruktiota, jossa kuori on ohjausyksikössä kiinni kahden tangon avulla, on myösehdotettu. Se mahdollistaisi paitsi ohjaamisen suoraan ajettaessa, myös paikallaankääntymisen.Nykyisellä konstruktiolla, kun pallon painopiste viritetään Rollon pystyakselille,pystytään tasaisella alustalla kulkemaan suoraan. Kuitenkin pienetkin epätasaisuudet,kuten maton reunat, kynnykset tai sähköjohdot saattavat saada sen kääntymäänsuunnastaan tai heilahtelemaan. Mikäli Rollo liikkuu esteen yli kohtisuoraan, eiongelmaa yleensä ole, mutta lähestyttäessä estettä viistosti saa se aikaansuunnanmuutoksen. Sisäisen kompassin ja gyroskoopin antamaa tietoa voitaisiinkäyttää suunnanmuutosten ja törmäyksien havaitsemiseen ohjelmoida Rollokorjaamaan suuntaansa, mutta heilunta hankaloittaa asennon ja suunnan mittaamista.Verraten matala este voi myös estää Rollon täysin vapaan liikkumisen. EsimerkiksiAutomaatiotekniikan laboratorion korkeat kynnykset ovat osoittautuneet esteiksi,joiden ylittäminen vaatii kohtisuoraa lähestymistä ja riittävää nopeutta.66
- Page 1 and 2:
Jere KnuuttilaTerveTaas - kotiautom
- Page 3 and 4:
Abstract of the Master’s ThesisAu
- Page 5 and 6:
4.1.4 Pehtoori ....................
- Page 8 and 9:
Konsoli-ikkuna engl. console window
- Page 10 and 11:
1 Tausta1.1 Omatoimisen elämän av
- Page 12 and 13:
saatavilla olevilla resursseilla, m
- Page 14 and 15:
olemassa olevaan järjestelmään,
- Page 16 and 17:
kännykkä käyttöliittymänäTV-
- Page 18 and 19:
Kuva 4 ISO/OSI-mallin tasot. Suomen
- Page 20 and 21:
Lisäksi tiedonsiirtoon käytettäe
- Page 22 and 23:
Langaton tiedonsiirtoLangaton tiedo
- Page 24 and 25: jatkui vuoden 2002 lopulle [Palowir
- Page 26 and 27: kierretty parikaapelipuhelinkaapeli
- Page 29 and 30: Kodin sisäinen tietokoneverkko on
- Page 31 and 32: 1.8 VideoneuvotteluPuhelin oli aika
- Page 33 and 34: alueilla. Tietokone- ja konsolipeli
- Page 35 and 36: 1.12 EtäläsnäoloEtäläsnäololl
- Page 37 and 38: 2.2 JärjestelmäTässä kappaleess
- Page 39 and 40: Dokumenttien jakaminen avustajan ja
- Page 41 and 42: liittää Ethernet-paikallisverkkoo
- Page 43 and 44: Kuvassa (Kuva 18) on esitetty esime
- Page 45 and 46: Kommunikointiin lähiverkossa CI/OS
- Page 47 and 48: 3.1.3 Ohjelmistot ja ohjelmakirjast
- Page 49 and 50: Rollon kehityshistoriaVuosikymmenen
- Page 51 and 52: Rollon osajärjestelmätKamera on o
- Page 53 and 54: adiolähetinvideokuvallePAL-videosi
- Page 55 and 56: Kommunikointi Apuri-sovelluksen kan
- Page 57 and 58: Kuva 30 Reitinsuunnittelualgoritmin
- Page 59 and 60: Kommunikointi käyttäjien kanssaVi
- Page 61 and 62: LogLog-olio hoitaa järjestelmän l
- Page 63 and 64: MySQLCleanerMySQLCleaner on erillin
- Page 65 and 66: Kuva 35 Mobiilit käyttöliittymät
- Page 67 and 68: verkkopistokkeista. Toimistohuoneen
- Page 69 and 70: keittiönliiketunnistinsavuhälytin
- Page 71 and 72: sisäänrakennettuna. Kun solmu saa
- Page 73: PostivalpasKuva 44 Postilaatikon po
- Page 77 and 78: 4.1.2 RolloottoriTerveTaas-projekti
- Page 79 and 80: voitaisiin toteuttaa OSGi:lla, olis
- Page 81 and 82: kamera aiheuttaa verkon tukkeutumis
- Page 83 and 84: 54,543,532,52Esteetön asuminenylee
- Page 85 and 86: 54,543,532,52Robotti vaaranhälytt
- Page 87 and 88: etäkäyttösovelluksen avulla. Vis
- Page 89 and 90: 5 Jatkokehitystä5.1 KotirobottiKot
- Page 91 and 92: 6 LaiteluetteloADSL-modeemi Toimiva
- Page 93 and 94: 7 Liitteet7.1 Liite 1, TerveTaas-pr
- Page 95 and 96: -> czXt: zoom tele for ms-> czXw:
- Page 97 and 98: 7.3 Liite 3, Rollo communication sp
- Page 99 and 100: cCamera did not initialize correctl
- Page 101 and 102: 7.4 Liite 4, Toimivassa kodissa suo
- Page 103 and 104: Mikä teitä kiinnostaa. (Laitteita
- Page 105 and 106: KotiautomaatioMiten kiinnostaviksi
- Page 107 and 108: 8 Lähteet8.1 Julkaisut ja dokument
- Page 109 and 110: Harmo, Panu 2002TerveTaas - kotiaut
- Page 111 and 112: Tulevaisuusvaliokunta 2001Gerontekn
- Page 113 and 114: COST 219 bis 2003Telecommunications
- Page 115 and 116: iRobot 2003Roomba Intelligent Floor
- Page 117 and 118: Nieminen, TomiOSI, Open System Inte
- Page 119 and 120: Tietotekniikan liitto 2003ATK-sanak