ostnumbers start going negative when rolling backwards belowzero.%p rim position, at the moment in encoder pulses, zero isthe position at reset, full rotation is 12033 pulses. See also ->gp104%s rolling speed (pulses/100ms)%v main battery voltage ADC%b backup battery voltage ADC%c main current ADC%l light sensor ADC%g gyro ADCAn example: "dfC%CP%PR%R" which is also the default andproduces a data string message like "dC431P34R50".Send data once.Stop data sending.Start data sending at times ten milliseconds. See D (capital 'D') Display Commands, after 'D' can follow:0 (zero) Display off (sleep mode).1 Display on.c…Cgcgl,imt@,Command, send following comma-separated hex-formattedbytes to display, the first one is a command, any followingbytes are parameters.(capital 'C') Clear screen (graphics and text).Clear graphics layer.Put logo bitmap on screen at coordinates ,. Origin is topleft, is horizontal 0..239, is vertical 0..127. Bitmap'sorigin is its top left corner.Initialize display. Sets all display parameters correctly andclears display, done automatically at reset, so normally notneeded separately.Display mode, bits of the decimal define behaviour:bit0: 0:freeform display, 1:data displaySet text cursor at square ,. Origin is top left, ishorizontal 0..29, is vertical 0..15.tc Clear text layer and put text cursor at 0,0.tbBackspace: set text cursor one position back and clear characterunder it.tp… Print text. The characters to be printed (…) are taken to the endof message so this is the last command in message. The textcursor is left to the end of the text.
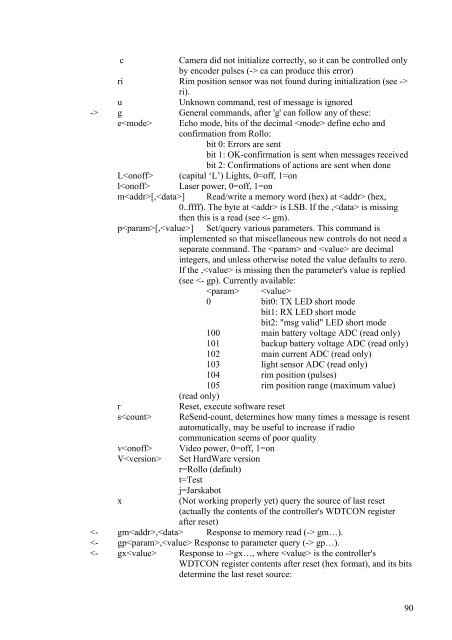
cCamera did not initialize correctly, so it can be controlled onlyby encoder pulses (-> ca can produce this error)ri Rim position sensor was not found during initialization (see ->ri).uUnknown command, rest of message is ignored-> g General commands, after 'g' can follow any of these:e Echo mode, bits of the decimal define echo andconfirmation from Rollo:bit 0: Errors are sentbit 1: OK-confirmation is sent when messages receivedbit 2: Confirmations of actions are sent when doneL (capital ‘L’) Lights, 0=off, 1=onl Laser power, 0=off, 1=onm[,] Read/write a memory word (hex) at (hex,0..ffff). The byte at is LSB. If the , is missingthen this is a read (see
- Page 1 and 2:
Jere KnuuttilaTerveTaas - kotiautom
- Page 3 and 4:
Abstract of the Master’s ThesisAu
- Page 5 and 6:
4.1.4 Pehtoori ....................
- Page 8 and 9:
Konsoli-ikkuna engl. console window
- Page 10 and 11:
1 Tausta1.1 Omatoimisen elämän av
- Page 12 and 13:
saatavilla olevilla resursseilla, m
- Page 14 and 15:
olemassa olevaan järjestelmään,
- Page 16 and 17:
kännykkä käyttöliittymänäTV-
- Page 18 and 19:
Kuva 4 ISO/OSI-mallin tasot. Suomen
- Page 20 and 21:
Lisäksi tiedonsiirtoon käytettäe
- Page 22 and 23:
Langaton tiedonsiirtoLangaton tiedo
- Page 24 and 25:
jatkui vuoden 2002 lopulle [Palowir
- Page 26 and 27:
kierretty parikaapelipuhelinkaapeli
- Page 29 and 30:
Kodin sisäinen tietokoneverkko on
- Page 31 and 32:
1.8 VideoneuvotteluPuhelin oli aika
- Page 33 and 34:
alueilla. Tietokone- ja konsolipeli
- Page 35 and 36:
1.12 EtäläsnäoloEtäläsnäololl
- Page 37 and 38:
2.2 JärjestelmäTässä kappaleess
- Page 39 and 40:
Dokumenttien jakaminen avustajan ja
- Page 41 and 42:
liittää Ethernet-paikallisverkkoo
- Page 43 and 44:
Kuvassa (Kuva 18) on esitetty esime
- Page 45 and 46:
Kommunikointiin lähiverkossa CI/OS
- Page 47 and 48: 3.1.3 Ohjelmistot ja ohjelmakirjast
- Page 49 and 50: Rollon kehityshistoriaVuosikymmenen
- Page 51 and 52: Rollon osajärjestelmätKamera on o
- Page 53 and 54: adiolähetinvideokuvallePAL-videosi
- Page 55 and 56: Kommunikointi Apuri-sovelluksen kan
- Page 57 and 58: Kuva 30 Reitinsuunnittelualgoritmin
- Page 59 and 60: Kommunikointi käyttäjien kanssaVi
- Page 61 and 62: LogLog-olio hoitaa järjestelmän l
- Page 63 and 64: MySQLCleanerMySQLCleaner on erillin
- Page 65 and 66: Kuva 35 Mobiilit käyttöliittymät
- Page 67 and 68: verkkopistokkeista. Toimistohuoneen
- Page 69 and 70: keittiönliiketunnistinsavuhälytin
- Page 71 and 72: sisäänrakennettuna. Kun solmu saa
- Page 73 and 74: PostivalpasKuva 44 Postilaatikon po
- Page 75 and 76: 4 Tulokset4.1 Järjestelmän toimiv
- Page 77 and 78: 4.1.2 RolloottoriTerveTaas-projekti
- Page 79 and 80: voitaisiin toteuttaa OSGi:lla, olis
- Page 81 and 82: kamera aiheuttaa verkon tukkeutumis
- Page 83 and 84: 54,543,532,52Esteetön asuminenylee
- Page 85 and 86: 54,543,532,52Robotti vaaranhälytt
- Page 87 and 88: etäkäyttösovelluksen avulla. Vis
- Page 89 and 90: 5 Jatkokehitystä5.1 KotirobottiKot
- Page 91 and 92: 6 LaiteluetteloADSL-modeemi Toimiva
- Page 93 and 94: 7 Liitteet7.1 Liite 1, TerveTaas-pr
- Page 95 and 96: -> czXt: zoom tele for ms-> czXw:
- Page 97: 7.3 Liite 3, Rollo communication sp
- Page 101 and 102: 7.4 Liite 4, Toimivassa kodissa suo
- Page 103 and 104: Mikä teitä kiinnostaa. (Laitteita
- Page 105 and 106: KotiautomaatioMiten kiinnostaviksi
- Page 107 and 108: 8 Lähteet8.1 Julkaisut ja dokument
- Page 109 and 110: Harmo, Panu 2002TerveTaas - kotiaut
- Page 111 and 112: Tulevaisuusvaliokunta 2001Gerontekn
- Page 113 and 114: COST 219 bis 2003Telecommunications
- Page 115 and 116: iRobot 2003Roomba Intelligent Floor
- Page 117 and 118: Nieminen, TomiOSI, Open System Inte
- Page 119 and 120: Tietotekniikan liitto 2003ATK-sanak