Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
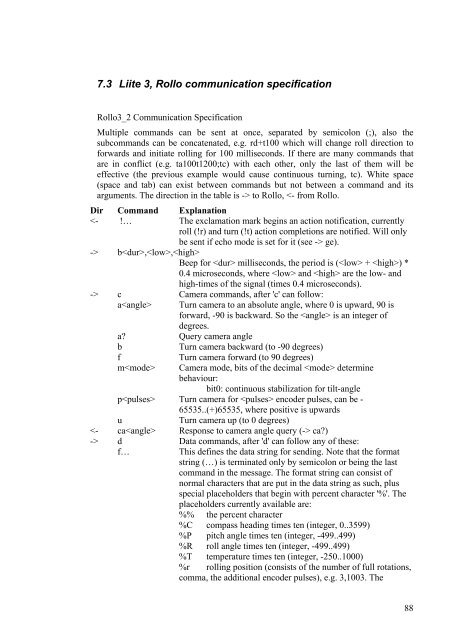
7.3 Liite 3, Rollo communication specificationRollo3_2 Communication SpecificationMultiple commands can be sent at once, separated by semicolon (;), also thesubcommands can be concatenated, e.g. rd+t100 which will change roll direction toforwards and initiate rolling for 100 milliseconds. If there are many commands thatare in conflict (e.g. ta100t1200;tc) with each other, only the last of them will beeffective (the previous example would cause continuous turning, tc). White space(space and tab) can exist between commands but not between a command and itsarguments. The direction in the table is -> to Rollo, b,,Beep for milliseconds, the period is ( + ) *0.4 microseconds, where and are the low- andhigh-times of the signal (times 0.4 microseconds).-> c Camera commands, after 'c' can follow:a Turn camera to an absolute angle, where 0 is upward, 90 isforward, -90 is backward. So the is an integer ofdegrees.a? Query camera anglebTurn camera backward (to -90 degrees)fTurn camera forward (to 90 degrees)m Camera mode, bits of the decimal determinebehaviour:bit0: continuous stabilization for tilt-anglep Turn camera for encoder pulses, can be -65535..(+)65535, where positive is upwardsuTurn camera up (to 0 degrees) ca?)-> d Data commands, after 'd' can follow any of these:f…This defines the data string for sending. Note that the formatstring (…) is terminated only by semicolon or being the lastcommand in the message. The format string can consist ofnormal characters that are put in the data string as such, plusspecial placeholders that begin with percent character '%'. Theplaceholders currently available are:%% the percent character%C compass heading times ten (integer, 0..3599)%P pitch angle times ten (integer, -499..499)%R roll angle times ten (integer, -499..499)%T temperature times ten (integer, -250..1000)%r rolling position (consists of the number of full rotations,comma, the additional encoder pulses), e.g. 3,1003. The88