Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...
Jere Knuuttila TerveTaas â kotiautomaatiota hyödyntävä kotona ...

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
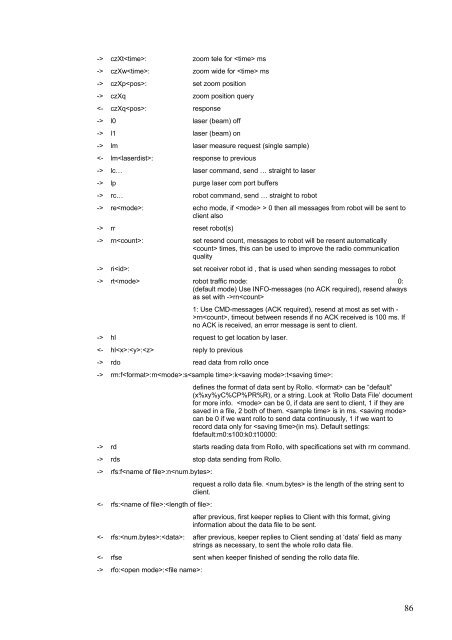
-> czXt: zoom tele for ms-> czXw: zoom wide for ms-> czXp: set zoom position-> czXq zoom position query l0 laser (beam) off-> l1 laser (beam) on-> lm laser measure request (single sample) lc… laser command, send … straight to laser-> lp purge laser com port buffers-> rc… robot command, send … straight to robot-> re: echo mode, if > 0 then all messages from robot will be sent toclient also-> rr reset robot(s)-> rn: set resend count, messages to robot will be resent automatically times, this can be used to improve the radio communicationquality-> ri: set receiver robot id , that is used when sending messages to robot-> rt robot traffic mode: 0:(default mode) Use INFO-messages (no ACK required), resend alwaysas set with ->rn1: Use CMD-messages (ACK required), resend at most as set with ->rn, timeout between resends if no ACK received is 100 ms. Ifno ACK is received, an error message is sent to client.-> hl request to get location by laser. rdo read data from rollo once-> rm:f:m:s:k:t:defines the format of data sent by Rollo. can be “default”(x%xy%yC%CP%PR%R), or a string. Look at ‘Rollo Data File’ documentfor more info. can be 0, if data are sent to client, 1 if they aresaved in a file, 2 both of them. is in ms. can be 0 if we want rollo to send data continuously, 1 if we want torecord data only for (in ms). Default settings:fdefault:m0:s100:k0:t10000:-> rd starts reading data from Rollo, with specifications set with rm command.-> rds stop data sending from Rollo.-> rfs:f:n:request a rollo data file. is the length of the string sent toclient.