
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
48 Технические науки<br />
«<strong>Молодой</strong> <strong>учёный</strong>» . № 3 (50) . Март, 2013 г.<br />
xi<br />
e i =<br />
x<br />
1,<br />
03684<br />
( )xQ ( )<br />
ixf<br />
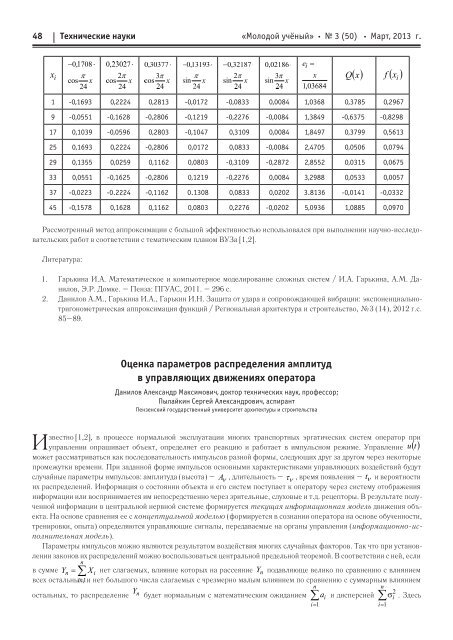
1 -0,1693 0,2224 0,2813 -0,0172 -0,0833 0,0084 1,0368 0,3785 0,2967<br />
9 -0,0551 -0,1628 -0,2806 -0,1219 -0,2276 -0,0084 1,3849 -0,6375 -0,8298<br />
17 0,1039 -0,0596 0,2803 -0,1047 0,3109 0,0084 1,8497 0,3799 0,5613<br />
25 0,1693 0,2224 -0,2806 0,0172 0,0833 -0,0084 2,4705 0,0506 0,0794<br />
29 0,1355 0,0259 0,1162 0,0803 -0,3109 -0,2872 2,8552 0,0315 0,0675<br />
33 0,0551 -0,1625 -0,2806 0,1219 -0,2276 0,0084 3,2988 0,0533 0,0057<br />
37 -0,0223 -0.2224 -0,1162 0.1308 0,0833 0,0202 3.8136 -0,0141 -0,0332<br />
45 -0,1578 0,1628 0,1162 0,0803 0,2276 -0,0202 5,0936 1,0885 0,0970<br />
Рассмотренный метод аппроксимации с большой эффективностью использовался при выполнении научно-исследовательских<br />
работ в соответствии с тематическим планом ВУЗа [1,2].<br />
Литература:<br />
1. Гарькина И.А. Математическое и компьютерное моделирование сложных систем / И.А. Гарькина, А.М. Данилов,<br />
Э.Р. Домке. – Пенза: ПГУАС, 2011. – 296 с.<br />
2. Данилов А.М., Гарькина И.А., Гарькин И.Н. Защита от удара и сопровождающей вибрации: экспоненциальнотригонометрическая<br />
аппроксимация функций / Региональная архитектура и строительство, № 3 (14), 2012 г.с.<br />
85–89.<br />
Оценка параметров распределения амплитуд<br />
в управляющих движениях оператора<br />
Данилов Александр Максимович, доктор технических наук, профессор;<br />
Пылайкин Сергей Александрович, аспирант<br />
Пензенский государственный университет архитектуры и строительства<br />
Известно [1,2], в процессе нормальной эксплуатации многих транспортных эргатических систем оператор при<br />
управлении опрашивает объект, определяет его реакцию и работает в импульсном режиме. Управление ()tu<br />
может рассматриваться как последовательность импульсов разной формы, следующих друг за другом через некоторые<br />
промежутки времени. При заданной форме импульсов основными характеристиками управляющих воздействий будут<br />
случайные параметры импульсов: амплитуда (высота) – A ν , длительность – t ν , время появления – t ν и вероятности<br />
их распределений. Информация о состоянии объекта и его систем поступает к оператору через систему отображения<br />
информации или воспринимается им непосредственно через зрительные, слуховые и т.д. рецепторы. В результате полученной<br />
информации в центральной нервной системе формируется текущая информационная модель движения объекта.<br />
На основе сравнения ее с концептуальной моделью (формируется в сознании оператора на основе обученности,<br />
тренировки, опыта) определяются управляющие сигналы, передаваемые на органы управления (информационно-исполнительная<br />
модель).<br />
Параметры импульсов можно являются результатом воздействия многих случайных факторов. Так что при установлении<br />
законов их распределений можно воспользоваться центральной предельной теоремой. В соответствии с ней, если<br />
n<br />
в сумме = ∑ XY<br />
in<br />
нет слагаемых, влияние которых на рассеяние Y n подавляюще велико по сравнению с влиянием<br />
всех остальных, i=<br />
1и<br />
нет большого числа слагаемых с чрезмерно малым влиянием по сравнению с суммарным влиянием<br />
остальных, то распределение n<br />
n<br />
n<br />
Y 2<br />
будет нормальным с математическим ожиданием ∑ ai<br />
и дисперсией ∑ σi<br />
. Здесь<br />
i=<br />
1<br />
i=<br />
1