

RC420 - Epson
RC420 - Epson
RC420 - Epson

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Wartung 10. Den Betrieb des Robotersystems prüfen<br />
114<br />
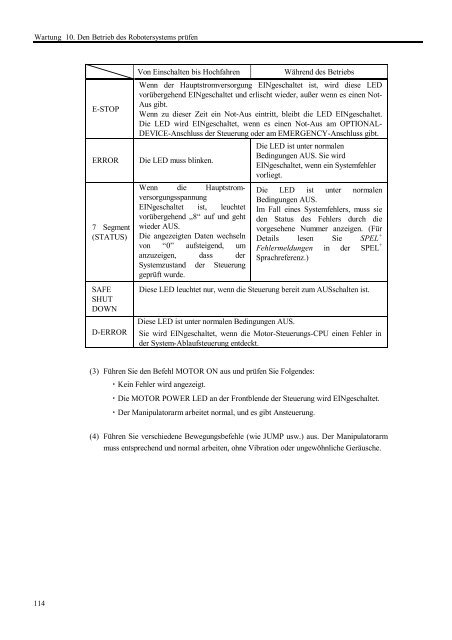
Von Einschalten bis Hochfahren Während des Betriebs<br />
E-STOP<br />
Wenn der Hauptstromversorgung EINgeschaltet ist, wird diese LED<br />
vorübergehend EINgeschaltet und erlischt wieder, außer wenn es einen Not-<br />
Aus gibt.<br />
Wenn zu dieser Zeit ein Not-Aus eintritt, bleibt die LED EINgeschaltet.<br />
Die LED wird EINgeschaltet, wenn es einen Not-Aus am OPTIONAL-<br />
DEVICE-Anschluss der Steuerung oder am EMERGENCY-Anschluss gibt.<br />
Die LED ist unter normalen<br />
ERROR Die LED muss blinken.<br />
Bedingungen AUS. Sie wird<br />
EINgeschaltet, wenn ein Systemfehler<br />
vorliegt.<br />
7 Segment<br />
(STATUS)<br />
SAFE<br />
SHUT<br />
DOWN<br />
D-ERROR<br />
Wenn die Hauptstromversorgungsspannung<br />
EINgeschaltet ist, leuchtet<br />
vorübergehend „8“ auf und geht<br />
wieder AUS.<br />
Die angezeigten Daten wechseln<br />
von “0” aufsteigend, um<br />
anzuzeigen, dass der<br />
Systemzustand der Steuerung<br />
geprüft wurde.<br />
Die LED ist unter normalen<br />
Bedingungen AUS.<br />
Im Fall eines Systemfehlers, muss sie<br />
den Status des Fehlers durch die<br />
vorgesehene Nummer anzeigen. (Für<br />
Details lesen Sie SPEL +<br />
Fehlermeldungen in der SPEL +<br />
Sprachreferenz.)<br />
Diese LED leuchtet nur, wenn die Steuerung bereit zum AUSschalten ist.<br />
Diese LED ist unter normalen Bedingungen AUS.<br />
Sie wird EINgeschaltet, wenn die Motor-Steuerungs-CPU einen Fehler in<br />
der System-Ablaufsteuerung entdeckt.<br />
(3) Führen Sie den Befehl MOTOR ON aus und prüfen Sie Folgendes:<br />
・Kein Fehler wird angezeigt.<br />
・Die MOTOR POWER LED an der Frontblende der Steuerung wird EINgeschaltet.<br />
・Der Manipulatorarm arbeitet normal, und es gibt Ansteuerung.<br />
(4) Führen Sie verschiedene Bewegungsbefehle (wie JUMP usw.) aus. Der Manipulatorarm<br />
muss entsprechend und normal arbeiten, ohne Vibration oder ungewöhnliche Geräusche.














