

RC420 - Epson
RC420 - Epson
RC420 - Epson

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
Einrichten & Betrieb 8.1 E/A-Signal-Beschreibung (E/A Fernsteuerung-Einstellungen)<br />
SelRobot0 Roboter-Bit 0, Gewichtung 1 (*3).<br />
SelRobot1 Roboter-Bit 1, Gewichtung 2 (*3).<br />
SelRobot2 Roboter-Bit 2, Gewichtung 4 (*3).<br />
SelRobot3 Roboter-Bit 3, Gewichtung 8 (*3).<br />
SelGroup<br />
Wählt die aktuelle Programmgruppe, die mit dem Start-Eingang<br />
entsprechend der 4 Eingänge SelGroup0 bis SelGroup3 gestartet werden<br />
soll.<br />
SelGroup0 Gruppen-Bit 0, Gewichtung 1 (*4).<br />
SelGroup1 Gruppen-Bit 1, Gewichtung 2 (*4).<br />
SelGroup2 Gruppen-Bit 2, Gewichtung 4 (*4).<br />
SelGroup3 Gruppen-Bit 3, Gewichtung 8 (*4).<br />
(*1) Die SelRobot-Eingänge werden verwendet, um den Manipulatorarm zur Ausführung<br />
von Motor Mode, Power Mode, MCALComplete, AtHOME auszuwählen. Dies<br />
bezieht sich auf die Fernsteuerungs-Ausgänge CurrRobot0 bis 3 und die<br />
Fernsteuerungs-Eingänge Motor ON, Motor OFF, MCal und Home.<br />
(*2) Der Start-Eingang ist für die Gruppennummer aktiv, die mit den Bits SelGroup0-3<br />
angegeben ist.<br />
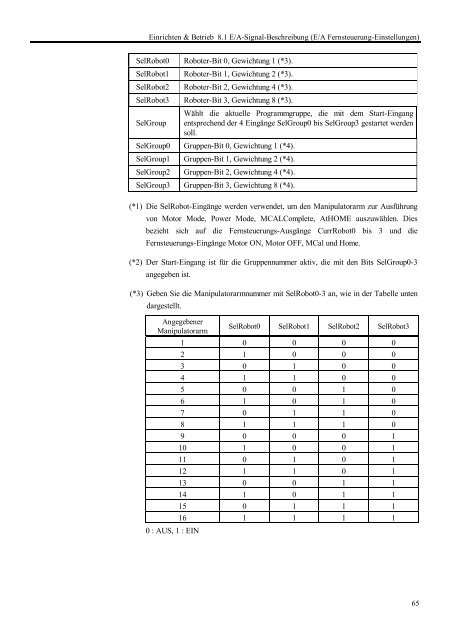
(*3) Geben Sie die Manipulatorarmnummer mit SelRobot0-3 an, wie in der Tabelle unten<br />
dargestellt.<br />
Angegebener<br />
Manipulatorarm<br />
0 : AUS, 1 : EIN<br />
SelRobot0 SelRobot1 SelRobot2 SelRobot3<br />
1 0 0 0 0<br />
2 1 0 0 0<br />
3 0 1 0 0<br />
4 1 1 0 0<br />
5 0 0 1 0<br />
6 1 0 1 0<br />
7 0 1 1 0<br />
8 1 1 1 0<br />
9 0 0 0 1<br />
10 1 0 0 1<br />
11 0 1 0 1<br />
12 1 1 0 1<br />
13 0 0 1 1<br />
14 1 0 1 1<br />
15 0 1 1 1<br />
16 1 1 1 1<br />
65














