

RC420 - Epson
RC420 - Epson
RC420 - Epson

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Einrichten & Betrieb 8.1 E/A-Signal-Beschreibung (E/A Fernsteuerung-Einstellungen)<br />
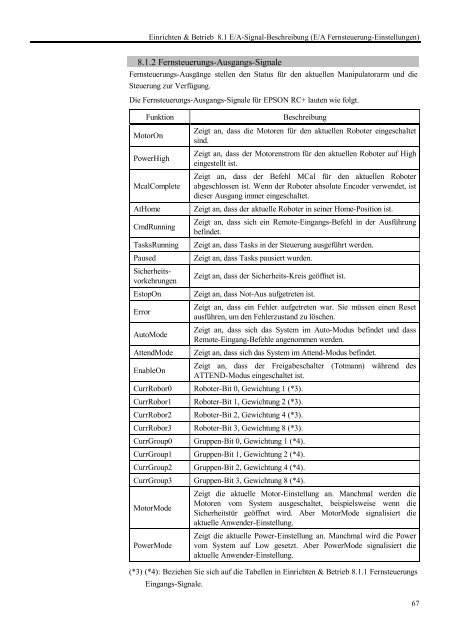
8.1.2 Fernsteuerungs-Ausgangs-Signale<br />
Fernsteuerungs-Ausgänge stellen den Status für den aktuellen Manipulatorarm und die<br />
Steuerung zur Verfügung.<br />
Die Fernsteuerungs-Ausgangs-Signale für EPSON RC+ lauten wie folgt.<br />
Funktion Beschreibung<br />
MotorOn<br />
Zeigt an, dass die Motoren für den aktuellen Roboter eingeschaltet<br />
sind.<br />
PowerHigh<br />
Zeigt an, dass der Motorenstrom für den aktuellen Roboter auf High<br />
eingestellt ist.<br />
Zeigt an, dass der Befehl MCal für den aktuellen Roboter<br />
McalComplete abgeschlossen ist. Wenn der Roboter absolute Encoder verwendet, ist<br />
dieser Ausgang immer eingeschaltet.<br />
AtHome Zeigt an, dass der aktuelle Roboter in seiner Home-Position ist.<br />
CmdRunning<br />
Zeigt an, dass sich ein Remote-Eingangs-Befehl in der Ausführung<br />
befindet.<br />
TasksRunning Zeigt an, dass Tasks in der Steuerung ausgeführt werden.<br />
Paused Zeigt an, dass Tasks pausiert wurden.<br />
Sicherheitsvorkehrungen<br />
Zeigt an, dass der Sicherheits-Kreis geöffnet ist.<br />
EstopOn Zeigt an, dass Not-Aus aufgetreten ist.<br />
Error<br />
Zeigt an, dass ein Fehler aufgetreten war. Sie müssen einen Reset<br />
ausführen, um den Fehlerzustand zu löschen.<br />
AutoMode<br />
Zeigt an, dass sich das System im Auto-Modus befindet und dass<br />
Remote-Eingang-Befehle angenommen werden.<br />
AttendMode Zeigt an, dass sich das System im Attend-Modus befindet.<br />
EnableOn<br />
Zeigt an, dass der Freigabeschalter (Totmann) während des<br />
ATTEND-Modus eingeschaltet ist.<br />
CurrRobor0 Roboter-Bit 0, Gewichtung 1 (*3).<br />
CurrRobor1 Roboter-Bit 1, Gewichtung 2 (*3).<br />
CurrRobor2 Roboter-Bit 2, Gewichtung 4 (*3).<br />
CurrRobor3 Roboter-Bit 3, Gewichtung 8 (*3).<br />
CurrGroup0 Gruppen-Bit 0, Gewichtung 1 (*4).<br />
CurrGroup1 Gruppen-Bit 1, Gewichtung 2 (*4).<br />
CurrGroup2 Gruppen-Bit 2, Gewichtung 4 (*4).<br />
CurrGroup3 Gruppen-Bit 3, Gewichtung 8 (*4).<br />
Zeigt die aktuelle Motor-Einstellung an. Manchmal werden die<br />
MotorMode<br />
Motoren vom System ausgeschaltet, beispielsweise wenn die<br />
Sicherheitstür geöffnet wird. Aber MotorMode signalisiert die<br />
aktuelle Anwender-Einstellung.<br />
Zeigt die aktuelle Power-Einstellung an. Manchmal wird die Power<br />
PowerMode vom System auf Low gesetzt. Aber PowerMode signalisiert die<br />
aktuelle Anwender-Einstellung.<br />
(*3) (*4): Beziehen Sie sich auf die Tabellen in Einrichten & Betrieb 8.1.1 Fernsteuerungs<br />
Eingangs-Signale.<br />
67














