

RC420 - Epson
RC420 - Epson
RC420 - Epson

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
Einrichten & Betrieb 8.1 E/A-Signal-Beschreibung (E/A Fernsteuerung-Einstellungen)<br />
64<br />
8.1 E/A-Signal Beschreibung<br />
HINWEIS<br />
�<br />
Sie können entweder Standard-E/A oder Erweiterungs-E/A für die Fernsteuerung<br />
verwenden. Um alle Signale zu verwenden, müssen Sie Erweiterungs-E/A hinzufügen.<br />
8.1.1 Fernsteuerungs Eingangs-Signale<br />
Fernsteuerungs-Eingänge werden verwendet, um die Manipulatorarme zu steuern und<br />
Programme zu starten. Vor dem Aktivieren von Eingängen müssen bestimmte Bedingungen<br />
erfüllt werden, wie unten in der Tabelle dargestellt.<br />
Wenn ein Fehler auftritt, müssen Sie ein Reset durchführen, um den Fehlerzustand zu<br />
löschen, bevor irgendwelche weiteren Fernsteuerungs-Eingangs-Befehle ausgeführt werden<br />
können. Daher wird empfohlen, dass die Fernsteuerungs-Geräte der Fehler-Ausgang und<br />
Reset-Eingang verwendet werden, um die Fehlerzustände zu überwachen und zu löschen.<br />
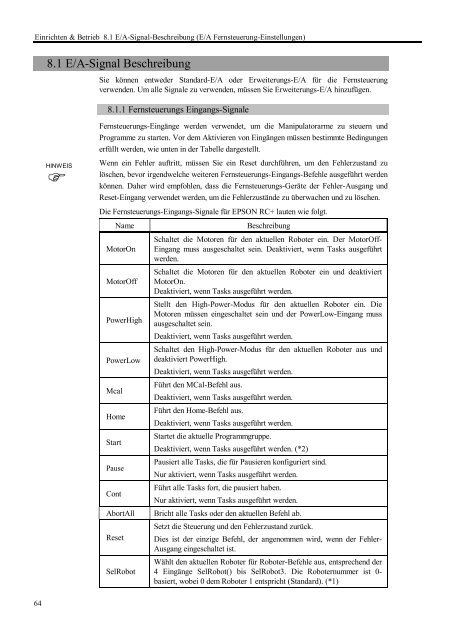
Die Fernsteuerungs-Eingangs-Signale für EPSON RC+ lauten wie folgt.<br />
Name Beschreibung<br />
Schaltet die Motoren für den aktuellen Roboter ein. Der MotorOff-<br />
MotorOn Eingang muss ausgeschaltet sein. Deaktiviert, wenn Tasks ausgeführt<br />
werden.<br />
Schaltet die Motoren für den aktuellen Roboter ein und deaktiviert<br />
MotorOff MotorOn.<br />
Deaktiviert, wenn Tasks ausgeführt werden.<br />
Stellt den High-Power-Modus für den aktuellen Roboter ein. Die<br />
Motoren müssen eingeschaltet sein und der PowerLow-Eingang muss<br />
PowerHigh<br />
ausgeschaltet sein.<br />
Deaktiviert, wenn Tasks ausgeführt werden.<br />
Schaltet den High-Power-Modus für den aktuellen Roboter aus und<br />
PowerLow deaktiviert PowerHigh.<br />
Deaktiviert, wenn Tasks ausgeführt werden.<br />
Führt den MCal-Befehl aus.<br />
Mcal<br />
Deaktiviert, wenn Tasks ausgeführt werden.<br />
Führt den Home-Befehl aus.<br />
Home<br />
Deaktiviert, wenn Tasks ausgeführt werden.<br />
Startet die aktuelle Programmgruppe.<br />
Start<br />
Deaktiviert, wenn Tasks ausgeführt werden. (*2)<br />
Pausiert alle Tasks, die für Pausieren konfiguriert sind.<br />
Pause<br />
Nur aktiviert, wenn Tasks ausgeführt werden.<br />
Führt alle Tasks fort, die pausiert haben.<br />
Cont<br />
Nur aktiviert, wenn Tasks ausgeführt werden.<br />
AbortAll Bricht alle Tasks oder den aktuellen Befehl ab.<br />
Setzt die Steuerung und den Fehlerzustand zurück.<br />
Reset Dies ist der einzige Befehl, der angenommen wird, wenn der Fehler-<br />
Ausgang eingeschaltet ist.<br />
Wählt den aktuellen Roboter für Roboter-Befehle aus, entsprechend der<br />
SelRobot 4 Eingänge SelRobot() bis SelRobot3. Die Roboternummer ist 0basiert,<br />
wobei 0 dem Roboter 1 entspricht (Standard). (*1)














