O+P Fluidtechnik 6/2018
O+P Fluidtechnik 6/2018
O+P Fluidtechnik 6/2018
- TAGS
- fluidtechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
STEUERUNGEN UND REGELUNGEN<br />
mx ̇̇ + dx ̇ = p , (17)<br />
A<br />
A − A<br />
pB A − B<br />
FL (16)<br />
die Druckaufbaugleichungen<br />
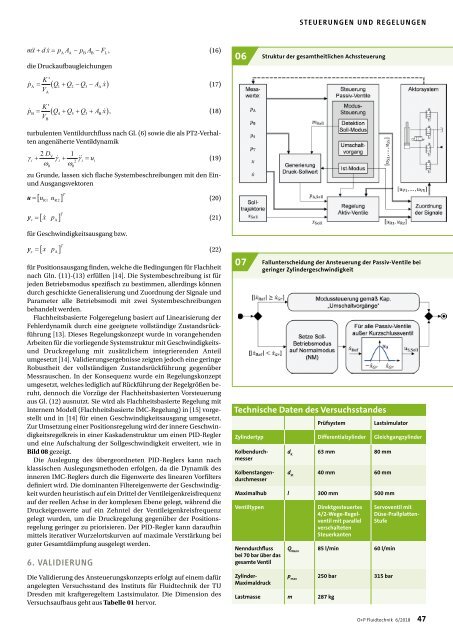
06<br />
Struktur der gesamtheitlichen Achssteuerung<br />
K '<br />
ṗ<br />
= Q + Q −Q − A x<br />
( ̇)<br />
A 1 2 3 A<br />
VA<br />
(17) (18)<br />
K '<br />
ṗ<br />
= Q + Q + Q + A x , (18) (19)<br />
( ̇)<br />
B 4 5 3 B<br />
VB<br />
turbulenten Ventildurchfluss nach Gl. (6) sowie die als PT2-Verhalten<br />
angenäherte Ventildynamik<br />
2 D 1<br />
γ + ̇ γ + ̇̇ γ = u<br />
V<br />
i i 2 i i<br />
ω0 ω0<br />
(19) (20)<br />
zu Grunde, lassen sich flache Systembeschreibungen mit den Einund<br />
Ausgangsvektoren<br />
u =<br />
[ u u ]<br />
R1<br />
T<br />
R2<br />
(20) (21)<br />
y<br />
v<br />
[ x p ]<br />
= ̇<br />
T<br />
A<br />
(21) (22)<br />
für Geschwindigkeitsausgang bzw.<br />
[ ]<br />
T<br />
yx = x pA (22) (23)<br />
für Positionsausgang finden, welche die Bedingungen für Flachheit<br />
nach Gln. (11)-(13) erfüllen [14]. Die Systembeschreibung ist für<br />
jeden Betriebsmodus spezifisch zu bestimmen, allerdings können<br />
durch geschickte Generalisierung und Zuordnung der Signale und<br />
Parameter alle Betriebsmodi mit zwei Systembeschreibungen<br />
behandelt werden.<br />
Flachheitsbasierte Folgeregelung basiert auf Linearisierung der<br />
Fehlerdynamik durch eine geeignete vollständige Zustandsrückführung<br />
[13]. Dieses Regelungskonzept wurde in vorangehenden<br />
Arbeiten für die vorliegende Systemstruktur mit Geschwindigkeitsund<br />
Druckregelung mit zusätzlichem integrierenden Anteil<br />
umgesetzt [14]. Validierungsergebnisse zeigten jedoch eine geringe<br />
Robustheit der vollständigen Zustandsrückführung gegenüber<br />
Messrauschen. In der Konsequenz wurde ein Regelungskonzept<br />
umgesetzt, welches lediglich auf Rückführung der Regelgrößen beruht,<br />
dennoch die Vorzüge der Flachheitsbasierten Vorsteuerung<br />
aus Gl. (12) ausnutzt. Sie wird als Flachheitsbasierte Regelung mit<br />
Internem Modell (Flachheitsbasierte IMC-Regelung) in [15] vorgestellt<br />
und in [14] für einen Geschwindigkeitsausgang umgesetzt.<br />
Zur Umsetzung einer Positionsregelung wird der innere Geschwindigkeitsregelkreis<br />
in einer Kaskadenstruktur um einen PID-Regler<br />
und eine Aufschaltung der Sollgeschwindigkeit erweitert, wie in<br />
Bild 08 gezeigt.<br />
Die Auslegung des übergeordneten PID-Reglers kann nach<br />
klassischen Auslegungsmethoden erfolgen, da die Dynamik des<br />
inneren IMC-Reglers durch die Eigenwerte des linearen Vorfilters<br />
definiert wird. Die dominanten Filtereigenwerte der Geschwindigkeit<br />
wurden heuristisch auf ein Drittel der Ventileigenkreisfrequenz<br />
auf der reellen Achse in der komplexen Ebene gelegt, während die<br />
Druckeigenwerte auf ein Zehntel der Ventileigenkreisfrequenz<br />
gelegt wurden, um die Druckregelung gegenüber der Positionsregelung<br />
geringer zu priorisieren. Der PID-Regler kann daraufhin<br />
mittels iterativer Wurzelortskurven auf maximale Verstärkung bei<br />
guter Gesamtdämpfung ausgelegt werden.<br />
6. VALIDIERUNG<br />
Die Validierung des Ansteuerungskonzepts erfolgt auf einem dafür<br />
angelegten Versuchsstand des Instituts für <strong>Fluidtechnik</strong> der TU<br />
Dresden mit kraftgeregeltem Lastsimulator. Die Dimension des<br />
Versuchsaufbaus geht aus Tabelle 01 hervor.<br />
07<br />
Fallunterscheidung der Ansteuerung der Passiv-Ventile bei<br />
geringer Zylindergeschwindigkeit<br />
Technische Daten des Versuchsstandes<br />
Prüfsystem<br />
Lastsimulator<br />
Zylindertyp Differentialzylinder Gleichgangzylinder<br />
Kolbendurchmesser<br />
Kolbenstangendurchmesser<br />
d K<br />
63 mm 80 mm<br />
d St<br />
40 mm 60 mm<br />
Maximalhub l 300 mm 500 mm<br />
Ventiltypen<br />
Nenndurchfluss<br />
bei 70 bar über das<br />
gesamte Ventil<br />
Zylinder-<br />
Maximaldruck<br />
Lastmasse m 287 kg<br />
Direktgesteuertes<br />
4/2-Wege-Regelventil<br />
mit parallel<br />
verschalteten<br />
Steuerkanten<br />
Q Nenn<br />
85 l/min 60 l/min<br />
p max<br />
250 bar 315 bar<br />
Servoventil mit<br />
Düse-Prallplatten-<br />
Stufe<br />
<strong>O+P</strong> <strong>Fluidtechnik</strong> 6/<strong>2018</strong> 47