Fisher® FIELDVUE DVC6200 Digital Valve Controller
Fisher® FIELDVUE DVC6200 Digital Valve Controller
Fisher® FIELDVUE DVC6200 Digital Valve Controller

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Principle of Operation<br />
July 2012<br />
Instruction Manual<br />
D103605X012<br />
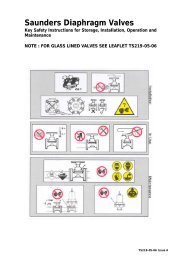
Figure A‐2. Typical <strong>FIELDVUE</strong> Instrument to Personal Computer Connections for <strong>Valve</strong>Link Software<br />
CONTROL SYSTEM<br />
HART MODEM<br />
FIELD TERM.<br />
E1362<br />
<strong>DVC6200</strong> digital valve controllers are loop‐powered instruments that provide a control valve position proportional to<br />
an input signal from the control room. The following describes a double‐acting digital valve controller mounted on a<br />
piston actuator.<br />
The input signal is routed into the terminal box through a single twisted pair of wires and then to the printed wiring<br />
board assembly submodule where it is read by the microprocessor, processed by a digital algorithm, and converted<br />
into an analog I/P drive signal.<br />
As the input signal increases, the drive signal to the I/P converter increases, increasing the I/P output pressure. The I/P<br />
output pressure is routed to the pneumatic relay submodule. The relay is also connected to supply pressure and<br />
amplifies the small pneumatic signal from the I/P converter. The relay accepts the amplified pneumatic signal and<br />
provides two output pressures. With increasing input (4 to 20 mA signal), the output A pressure always increases and<br />
the output B pressure decreases. The output A pressure is used for double‐acting and single‐acting direct applications.<br />
The output B pressure is used for double‐acting and single‐acting reverse applications. As shown in figure A‐3 the<br />
increased output A pressure causes the actuator stem to move downward. Stem position is sensed by the non‐contact<br />
travel feedback sensor. The stem continues to move downward until the correct stem position is attained. At this point<br />
the printed wiring board assembly stabilizes the I/P drive signal. This positions the flapper to prevent any further<br />
increase in nozzle pressure.<br />
As the input signal decreases, the drive signal to the I/P converter submodule decreases, decreasing the I/P output<br />
pressure. The pneumatic relay decreases the output A pressure and increases the output B pressure. The stem moves<br />
upward until the correct position is attained. At this point the printed wiring board assembly stabilizes the I/P drive<br />
signal. This positions the flapper to prevent any further decrease in nozzle pressure.<br />
80