
You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
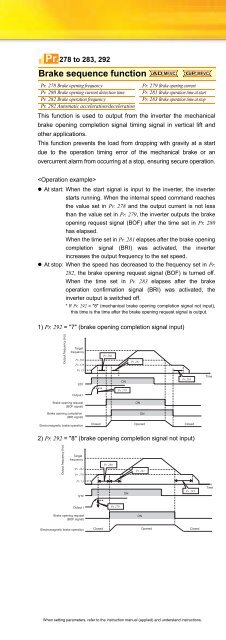
Pr.278 to 283, 292Brake sequence functionAD MFVCPr. 278 Brake opening frequencyPr. 279 Brake opening currentPr. 280 Brake opening current detection time Pr. 281 Brake operation time at startPr. 282 Brake operation frequencyPr. 283 Brake operation time at stopPr. 292 Automatic acceleration/decelerationThis function is used to output from the inverter the mechanicalbrake opening completion signal timing signal in vertical lift andother applications.This function prevents the load from dropping with gravity at a startdue to the operation timing error of the mechanical brake or anovercurrent alarm from occurring at a stop, ensuring secure operation.• At start: When the start signal is input to the inverter, the inverterstarts running. When the internal speed command reachesthe value set in Pr. 278 and the output current is not lessthan the value set in Pr. 279, the inverter outputs the brakeopening request signal (BOF) after the time set in Pr. 280has elapsed.When the time set in Pr. 281 elapses after the brake openingcompletion signal (BRI) was activated, the inverterincreases the output frequency to the set speed.• At stop: When the speed has decreased to the frequency set in Pr.282, the brake opening request signal (BOF) is turned off.When the time set in Pr. 283 elapses after the brakeoperation confirmation signal (BRI) was activated, theinverter output is switched off.* If Pr. 292 = "8" (mechanical brake opening completion signal not input),this time is the time after the brake opening request signal is output.1) Pr. 292 = "7" (brake opening completion signal input)Output frequency (Hz)STFOutput IBrake opening request(BOF signal)Brake opening completion(BRI signal)Electromagnetic brake operation2) Pr. 292 = "8" (brake opening completion signal not input)Output frequency (Hz)TargetfrequencyPr. 282Pr. 278Pr. 13TargetfrequencyPr. 282Pr. 278Pr. 13STFOutput IBrake opening request(BOF signal)Electromagnetic brake operationClosedClosedPr. 280Pr. 280Pr. 279ONPr. 279ONPr. 281ONONOpenedPr. 281ONOpenedGP MFVCPr. 283ClosedPr. 283ClosedTimeTimePr.NumberSettingRange278 0 to 30Hz279 0 to 200%280 0 to 2s281 0 to 5s282 0 to 30Hz283 0 to 5s2920, 1, 7, 8,11Pr.286, 287Droop controlPr. 286 Droop gainThis function is designed to balance the load in proportion to theload torque to provide the speed drooping characteristic.This function is effective for balancing the load when usingmultiple invertersPr.Number286287• Droop controlThis control is valid when a value other than "0" is set in Pr. 286under advanced magnetic flux vector control.The maximum droop compensation frequency is 120Hz.Pr.Pr.Pr.Pr.Rated frequencyDescriptionSet to the rated slip frequency of the motor +about 1.0Hz.This parameter may be set only if Pr. 278 ≤ Pr. 282.Generally, set this parameter to about 50 to90%. If the setting is too low, the load is liableto drop due to gravity at start.Suppose that the rated inverter current is100%.Generally, set this parameter to about 0.1 to0.3s.Pr. 292 = 7: Set the mechanical delay time untilthe brake is loosened.Pr. 292 = 8: Set the mechanical delay time untilthe brake is loosened + about 0.1 to 0.2s.At this frequency, the brake opening requestsignal (BOF) is switched off. Generally, set thisparameter to the Pr. 278 setting + 3 to 4Hz.This parameter may be only set if Pr. 282 ≥ Pr. 278.Pr. 292 =7: Set the mechanical delay time untilthe brake is closed + 0.1s.Pr. 292 =8: Set the mechanical delay time untilthe brake is closed + 0.2 to 0.3s.Brake sequence function is made valid when asetting is "7" or "8".Pr. 287 Droop filter time constantSettingDescriptionRange0Droop control is invalid(initial value)Set the drooping amount at the rated torque0.1 to 100% as a percentage with respect to the ratedmotor frequency.-100%0.00 to1.00sAD MFVCSet the time constant of the filter applied onthe torque amount current.Frequency command0Droop compensationfrequencyDroopgain100% Torque292, 293 Refer to the section about Pr. 61.295 Refer to the section about Pr. 161.298 Refer to the section about Pr. 82.299 Refer to the section about Pr. 57.FeaturesPeripheralDevicesStandardSpecificationsOutlineDimensionDrawingsTerminal ConnectionDiagramTerminal SpecificationExplanationOperation panelParameter unitFR ConfiguratorOptionsInstructionsMotorCompatibilityWarrantyInquiryParameterListExplanationsofParametersProtectiveFunctionsWhen setting parameters, refer to the instruction manual (applied) and understand instructions.44