Manuel de maintenance - Rosemount Tank Radar
Manuel de maintenance - Rosemount Tank Radar
Manuel de maintenance - Rosemount Tank Radar

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Manuel</strong> <strong>de</strong> <strong>maintenance</strong><br />
308012FR, Édition 1B<br />
juin 2007<br />
<strong>Rosemount</strong> <strong>Tank</strong> <strong>Radar</strong> REX<br />
Chapitre 3 Description <strong>de</strong> l’appareil<br />
3.2.3 Logiciel<br />
Le logiciel FCU contrôle la<br />
collection <strong>de</strong> données provenant<br />
<strong>de</strong>s unités connectées au bus <strong>de</strong><br />
terrain et gère la distribution <strong>de</strong>s<br />
données à l’ordinateur <strong>Tank</strong>Master<br />
sur le bus <strong>de</strong> groupe.<br />
Les processus <strong>de</strong>s bus <strong>de</strong> groupe<br />
et <strong>de</strong> terrains fonctionnement<br />
comme <strong>de</strong>s interfaces au contrôle<br />
<strong>de</strong> communication en série, SCC.<br />
Le commutateur EEPROM est<br />
utilisé par le programme pour<br />
déterminer s’il est autorisé à écrire<br />
sur l’EEPROM. Le chien <strong>de</strong> gar<strong>de</strong><br />
doit être déclenché au moins toutes<br />
les dix secon<strong>de</strong>s ; sinon, une<br />
réinitialisation est effectuée. Les<br />
canaux d’accès direct à la mémoire<br />
(DMA) dans le microprocesseur<br />
FCU sont utilisés pour écrire au<br />
SCC.<br />
Group Bus <strong>de</strong><br />
groupe<br />
Bus<br />
Field<br />
Bus<br />
Bus <strong>de</strong><br />
terrain<br />
<strong>Tank</strong>-<br />
Master<br />
FCU<br />
RTG/DAU<br />
Maître<br />
Master<br />
Esclave Slave<br />
Maître Master<br />
Slave<br />
Esclave<br />
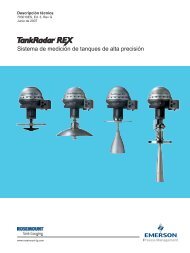
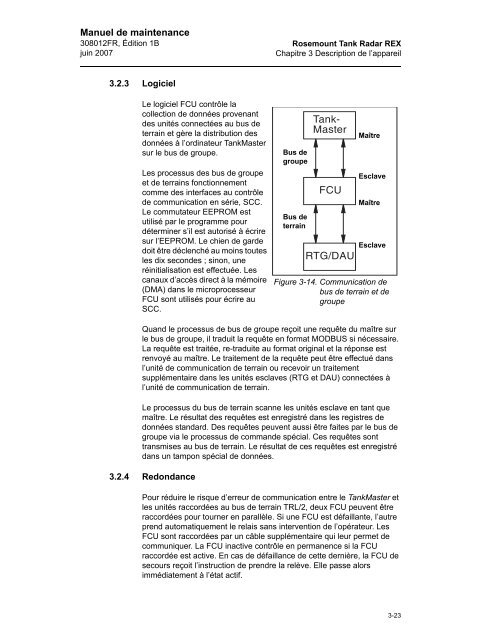
Figure 3-14. Communication <strong>de</strong><br />
bus <strong>de</strong> terrain et <strong>de</strong><br />
groupe<br />
Quand le processus <strong>de</strong> bus <strong>de</strong> groupe reçoit une requête du maître sur<br />
le bus <strong>de</strong> groupe, il traduit la requête en format MODBUS si nécessaire.<br />
La requête est traitée, re-traduite au format original et la réponse est<br />
renvoyé au maître. Le traitement <strong>de</strong> la requête peut être effectué dans<br />
l’unité <strong>de</strong> communication <strong>de</strong> terrain ou recevoir un traitement<br />
supplémentaire dans les unités esclaves (RTG et DAU) connectées à<br />
l’unité <strong>de</strong> communication <strong>de</strong> terrain.<br />
Le processus du bus <strong>de</strong> terrain scanne les unités esclave en tant que<br />
maître. Le résultat <strong>de</strong>s requêtes est enregistré dans les registres <strong>de</strong><br />
données standard. Des requêtes peuvent aussi être faites par le bus <strong>de</strong><br />
groupe via le processus <strong>de</strong> comman<strong>de</strong> spécial. Ces requêtes sont<br />
transmises au bus <strong>de</strong> terrain. Le résultat <strong>de</strong> ces requêtes est enregistré<br />
dans un tampon spécial <strong>de</strong> données.<br />
3.2.4 Redondance<br />
Pour réduire le risque d’erreur <strong>de</strong> communication entre le <strong>Tank</strong>Master et<br />
les unités raccordées au bus <strong>de</strong> terrain TRL/2, <strong>de</strong>ux FCU peuvent être<br />
raccordées pour tourner en parallèle. Si une FCU est défaillante, l’autre<br />
prend automatiquement le relais sans intervention <strong>de</strong> l’opérateur. Les<br />
FCU sont raccordées par un câble supplémentaire qui leur permet <strong>de</strong><br />
communiquer. La FCU inactive contrôle en permanence si la FCU<br />
raccordée est active. En cas <strong>de</strong> défaillance <strong>de</strong> cette <strong>de</strong>rnière, la FCU <strong>de</strong><br />
secours reçoit l’instruction <strong>de</strong> prendre la relève. Elle passe alors<br />
immédiatement à l’état actif.<br />
3-23