Læs hele bacheloropgaven her - Børnefysioterapi
Læs hele bacheloropgaven her - Børnefysioterapi
Læs hele bacheloropgaven her - Børnefysioterapi

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Teori og hypotese: relevans for praksis<br />
Teorier om motorisk kontrol har da som sigte at, ved hjælp af hypoteser, forklare denne<br />
menneskets evne til at frembringe koordinerede og til omgivelserne tilpassede bevægelser.<br />
En teori er ”a set of interconnected statements that describe unobservable structures or<br />
processes and relate them to each ot<strong>her</strong> and to observable events.” (Shumway-Cook &<br />
Woollacott, 2001, s. 9).<br />
En hypotese er ”a tentative statement or explanation for observed events, which can then be<br />
tested by conducting a scientific experiment.” (Rose & Christina, 2006, s. 3).<br />
Der er igennem tiden blevet foreslået adskillige teorier om motorisk kontrol (og motorisk<br />
læring), hver byggende på sine hypoteser, som ifølge videnskabelig praksis søges enten be-<br />
eller afkræftet. Der er ikke i dag nogen konsensus om en enkelt teori om motorisk kontrol<br />
(Rose & Christina, 2006 s. 19; Shumway-Cook & Woollacott, 2001 s. 7; Crutchfield &<br />
Barnes, 1993, s. 1), men derimod en generel enighed om vigtigheden af, at praktikeren gør<br />
sig bevidst om på hvilket teoretisk grundlag han baserer sin tilgang til patienter med deficits<br />
indenfor motorisk kontrol (Crutchfield & Barnes, 1993, s. 1; Gordon, 1987, s. 1; Magill,<br />
1998, s. 52; Shumway-Cook & Woollacot, 2001, s. 2), fordi denne teoretiske<br />
referenceramme, bevidst eller ubevidst, definerer indholdet af praksis (Gordon, 1987, s. 1 &<br />
s. 23; Rose & Christina, 2006, s. 2-3; Shumway-Cook & Woollacott, 2001 s. 9).<br />
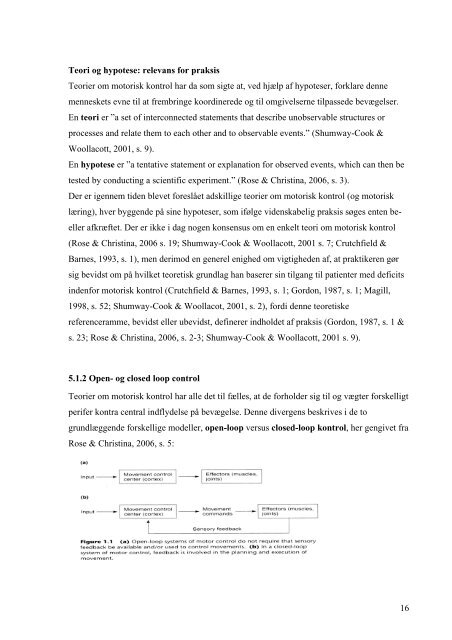
5.1.2 Open- og closed loop control<br />
Teorier om motorisk kontrol har alle det til fælles, at de forholder sig til og vægter forskelligt<br />
perifer kontra central indflydelse på bevægelse. Denne divergens beskrives i de to<br />
grundlæggende forskellige modeller, open-loop versus closed-loop kontrol, <strong>her</strong> gengivet fra<br />
Rose & Christina, 2006, s. 5:<br />
16