Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...
Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...
Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
158 KAPITEL 6. FUNKTIONALE BESCHREIBUNG VON BILDFOLGENPROGRAMMEN<br />
start <strong>die</strong> aktuelle <strong>Daten</strong>meßzeit zu ermitteln <strong>und</strong> <strong>die</strong>se <strong>für</strong> alle <strong>Daten</strong>zugriffe zu verwenden.<br />
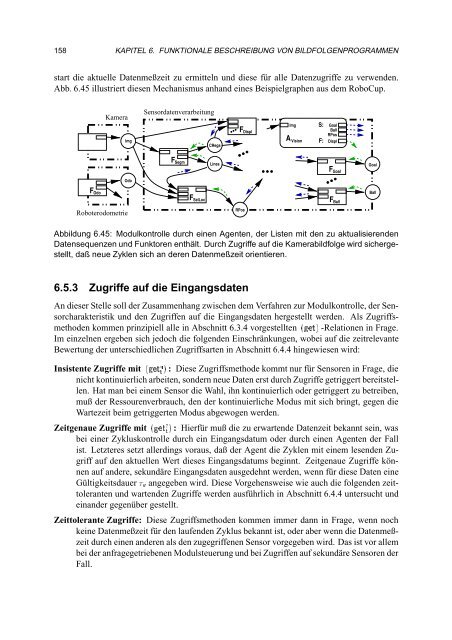
Abb. 6.45 illustriert <strong>die</strong>sen Mechanismus anhand eines Beispielgraphen aus dem RoboCup.<br />
F Cam<br />
F Odo<br />
Kamera<br />
Roboterodometrie<br />
Img<br />
Odo<br />
Sensordatenverarbeitung<br />
F Segm<br />
F SelLoc<br />
CRegs<br />
Lines<br />
F Displ<br />
S:<br />
Img Goal<br />
Ball<br />
A Vision<br />
RPos<br />
Displ<br />
Abbildung 6.45: Modulkontrolle durch einen Agenten, der Listen mit den zu aktualisierenden<br />
<strong>Daten</strong>sequenzen <strong>und</strong> Funktoren enthält. Durch Zugriffe auf <strong>die</strong> Kamerabildfolge wird sichergestellt,<br />
daß neue Zyklen sich an deren <strong>Daten</strong>meßzeit orientieren.<br />
6.5.3 Zugriffe auf <strong>die</strong> Eingangsdaten<br />
An <strong>die</strong>ser Stelle soll der Zusammenhang zwischen dem Verfahren zur Modulkontrolle, der Sensorcharakteristik<br />
<strong>und</strong> den Zugriffen auf <strong>die</strong> Eingangsdaten hergestellt werden. Als Zugriffsmethoden<br />
kommen prinzipiell alle in Abschnitt 6.3.4 vorgestellten Ø -Relationen in Frage.<br />
Im einzelnen ergeben sich jedoch <strong>die</strong> folgenden Einschränkungen, wobei auf <strong>die</strong> zeitrelevante<br />
Bewertung der unterschiedlichen Zugriffsarten in Abschnitt 6.4.4 hingewiesen wird:<br />
Insistente Zugriffe mit ØØ : Diese Zugriffsmethode kommt nur <strong>für</strong> Sensoren in Frage, <strong>die</strong><br />
nicht kontinuierlich arbeiten, sondern neue <strong>Daten</strong> erst durch Zugriffe getriggert bereitstellen.<br />
Hat man bei einem Sensor <strong>die</strong> Wahl, ihn kontinuierlich oder getriggert zu betreiben,<br />
muß der Ressourenverbrauch, den der kontinuierliche Modus mit sich bringt, gegen <strong>die</strong><br />
Wartezeit beim getriggerten Modus abgewogen werden.<br />
Zeitgenaue Zugriffe mit Ø <br />
Ø : Hier<strong>für</strong> muß <strong>die</strong> zu erwartende <strong>Daten</strong>zeit bekannt sein, was<br />
bei einer Zykluskontrolle durch ein Eingangsdatum oder durch einen Agenten der Fall<br />
ist. Letzteres setzt allerdings voraus, daß der Agent <strong>die</strong> Zyklen mit einem lesenden Zugriff<br />
auf den aktuellen Wert <strong>die</strong>ses Eingangsdatums beginnt. Zeitgenaue Zugriffe können<br />
auf andere, sek<strong>und</strong>äre Eingangsdaten ausgedehnt werden, wenn <strong>für</strong> <strong>die</strong>se <strong>Daten</strong> eine<br />
Gültigkeitsdauer Ú angegeben wird. Diese Vorgehensweise wie auch <strong>die</strong> folgenden zeittoleranten<br />
<strong>und</strong> wartenden Zugriffe werden ausführlich in Abschnitt 6.4.4 untersucht <strong>und</strong><br />
einander gegenüber gestellt.<br />
Zeittolerante Zugriffe: Diese Zugriffsmethoden kommen immer dann in Frage, wenn noch<br />
keine <strong>Daten</strong>meßzeit <strong>für</strong> den laufenden Zyklus bekannt ist, oder aber wenn <strong>die</strong> <strong>Daten</strong>meßzeit<br />
durch einen anderen als den zugegriffenen Sensor vorgegeben wird. Das ist vor allem<br />
bei der anfragegetriebenen Modulsteuerung <strong>und</strong> bei Zugriffen auf sek<strong>und</strong>äre Sensoren der<br />
Fall.<br />
RPos<br />
F:<br />
F Goal<br />
F Ball<br />
Goal<br />
Ball