Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...
Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...
Objektorientierte Daten- und Zeitmodelle für die Echtzeit ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
26 KAPITEL 2. ANWENDUNGSSZENARIO ROBOTERFUSSBALL: DER ROBOCUP<br />
wenden. Die Forschungsschwerpunkte der Simulatorklasse liegen vor allem in den Bereichen<br />
Aktionsplanung, Strategieakquisition, Agentenkooperation, Verhaltensmodellierung <strong>und</strong> <strong>Echtzeit</strong>animation.<br />
Small-Size League — F180: Die kleinen Roboter haben eine Gr<strong>und</strong>fläche von ca. 180 cm ,<br />
was einem Durchmesser von etwa 15 cm entspricht. Das Spielfeld hat <strong>die</strong> Größe einer Tischtennisplatte<br />
(ca. 152 cm ¢ 274 cm), der Ball <strong>die</strong> eines Golfballs. Über dem Spielfeld ist eine<br />
Kamera montiert, <strong>die</strong> <strong>die</strong> Steuerprogramme der Roboter mit den notwendigen Bilddaten versorgt.<br />
Definierte Farben <strong>für</strong> das Spielfeld <strong>und</strong> den Ball sowie farbige Marker auf den Robotern<br />
helfen den Programmen bei der Bestimmung der Positionen der verschiedenen Objekte auf dem<br />
Spielfeld.<br />
Alle Roboter einer Manschaft werden i.d.R. von einem Programm auf einem externen Rechner<br />
gesteuert, nur <strong>die</strong> reinen Fahrbefehle werden über eine Funkverbindung zum Roboter übertragen.<br />
Für <strong>die</strong> Forschung ist hier neben der Planung von Spielzügen vor allem das Beherrschen<br />
der Dynamik der Aktionen (software- <strong>und</strong> regelungstechnisch) interessant, da <strong>die</strong> Roboter relativ<br />
schnell sind.<br />
Middle-Size League — F2000: Da <strong>die</strong> Konzepte <strong>und</strong> Verfahren, <strong>die</strong> in <strong>die</strong>ser Arbeit vorgestellt<br />
werden, auf einem System der Middle-Size League umgesetzt <strong>und</strong> getestet wurden <strong>und</strong><br />
sich verschiedene Beispiele auf <strong>die</strong>ses Szenario beziehen, soll <strong>die</strong>ser Klasse etwas mehr Raum<br />
bei der Beschreibung eingeräumt werden. Abgesehen von der Legged-Robot League, <strong>die</strong>sich<br />
noch in einem sehr frühen Teststadium befindet, stellt <strong>die</strong>se Klasse derzeit <strong>die</strong> mit den komplexesten<br />
Systemanforderungen dar. Im Gegensatz zur Simulatorliga müssen hier reale Roboter in<br />
einer realen Welt beherrscht werden, <strong>und</strong> im Vergleich zur Small-Size League sind <strong>die</strong> einzelnen<br />
Roboter wirklich autonom <strong>und</strong> nur auf ihre lokalen Sensoren angewiesen.<br />
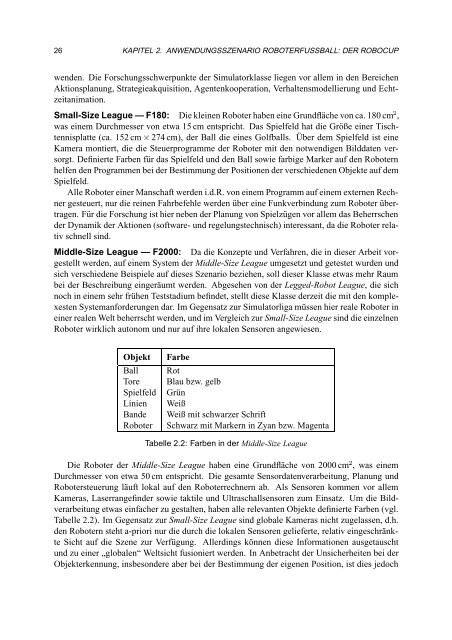
Objekt Farbe<br />
Ball Rot<br />
Tore Blau bzw. gelb<br />
Spielfeld Grün<br />
Linien Weiß<br />
Bande Weiß mit schwarzer Schrift<br />
Roboter Schwarz mit Markern in Zyan bzw. Magenta<br />
Tabelle 2.2: Farben in der Middle-Size League<br />
Die Roboter der Middle-Size League haben eine Gr<strong>und</strong>fläche von 2000 cm , was einem<br />
Durchmesser von etwa 50 cm entspricht. Die gesamte Sensordatenverarbeitung, Planung <strong>und</strong><br />
Robotersteuerung läuft lokal auf den Roboterrechnern ab. Als Sensoren kommen vor allem<br />
Kameras, Laserrangefinder sowie taktile <strong>und</strong> Ultraschallsensoren zum Einsatz. Um <strong>die</strong> Bildverarbeitung<br />
etwas einfacher zu gestalten, haben alle relevanten Objekte definierte Farben (vgl.<br />
Tabelle 2.2). Im Gegensatz zur Small-Size League sind globale Kameras nicht zugelassen, d.h.<br />
den Robotern steht a-priori nur <strong>die</strong> durch <strong>die</strong> lokalen Sensoren gelieferte, relativ eingeschränkte<br />
Sicht auf <strong>die</strong> Szene zur Verfügung. Allerdings können <strong>die</strong>se Informationen ausgetauscht<br />
<strong>und</strong> zu einer „globalen“ Weltsicht fusioniert werden. In Anbetracht der Unsicherheiten bei der<br />
Objekterkennung, insbesondere aber bei der Bestimmung der eigenen Position, ist <strong>die</strong>s jedoch